










Mi SciELO
 Servicios personalizados
Servicios personalizadosServicios Personalizados
Revista
Articulo
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares en
SciELO
Similares en
SciELO -
 Similares en Google
Similares en Google
Compartir

 Permalink
PermalinkArchivos Españoles de Urología (Ed. impresa)
versión impresa ISSN 0004-0614
Arch. Esp. Urol. vol.60 no.4 may. 2007
Colposacropexia laparoscópica asistida por robot como tratamiento del prolapso urogenital.
Robotic assisted laparoscopic colposacropexy in the treatment of pelvic.
Jesús Moreno Sierra, Isabel Galante Romo, Elena Ortiz Oshiro1, Carlos Núñez Mora y Ángel Silmi Moyano.
Servicio de Urología y Servicio de Cirugía General1. Unidad de Cirugía Robótica. Hospital Clínico San Carlos. Universidad Complutense. Madrid. España.
Dirección para correspondencia
RESUMEN
La colposacropexia laparoscópica es una técnica que ha venido a sustituir a la cirugía abierta para el tratamiento de los prolapsos del suelo pélvico. De la misma manera, la cirugía asistida por robot supone un nuevo paso en la evolución de la técnica. En este artículo pretendemos mostrar, tanto nuestra técnica quirúrgica como los resultados preliminares obtenidos con la misma.
En el Hospital Clínico San Carlos han sido intervenidas con esta técnica un total de 10 pacientes, desde Noviembre de 2006 hasta la fecha. La principal indicación en nuestro caso ha sido la presencia de prolapsos pélvicos sintomáticos, habiendose intervenido tanto pacientes histerectomizadas como no histerectomizadas, sin poder establecer diferencias significativas entre ambos casos. Como estudio preoperatorio se ha incluido: Cistografía, Ecografía Reno-vesical, Estudio Urodinámico en todos los casos, y tan sólo en aquellos en los que se ha considerado oportuno una Uro-Resonancia. Todas las pacientes han sido intervenidas bajo anestesia general, mediante colocación de un mínimo de tres trócares robóticos (8mm) y uno convencional para el ayudante, aunque en algunos casos, sobretodo al inicio de la serie se precisaron 2 trócares accesorios. Así mismo, en nuestra serie en la mayoría de los casos se ha asociado una técnica anti-incontinencia tipo sling suburetral transobturatriz, bien para tratamiento de la incontinencia urinaria de esfuerzo (IUE), bien para prevenir su posible aparición tras la correción del prolapso.
Los resultados obtenidos son comparables a los descritos en otras series más numerosas en cuanto a duración, estancia hospitalaria y complicaciones tanto precoces como tardías. A expensas de realizar una valoración a largo plazo y con series más amplias, podemos incluir la colposacropexia laparoscópica asistida por robot entre el arsenal terapéutico diseñado para la reparación de los prolapsos del suelo pélvico sintomáticos.
Palabras clave: Colposacropexia laparoscópica. Cirugía robótica. Incontinencia urinaria femenina. Cirugía de prolapso pélvico.
SUMMARY
Laparoscopic colposacropexy has become a substitute for open surgery in the treatment of pelvic organ prolapse. In the same way, robotic assisted surgery is a new step in the evolution of the procedure. In this paper we intend to show our surgical technique and preliminary results.
From November 2006 to date, 10 patients have undergone this procedure at the Hospital Clínico San Carlos. The main indication for the operation was existence of symptomatic pelvic prolapse. Both patients with or without hysterectomy have been operated, without making significant differences between them. Preoperative evaluation workout included: cystogram, urinary tract ultrasound and urodynamics in all cases; urinary tract MRI was performed only in selected cases. All patients underwent surgery under general anesthesia, with at least three robotic trocars (8 mm) and one conventional trocar for the assistant; 2 accessory trocars were necessary in some cases, mainly at the beginning of the series. Most procedures in our series were associated with a transobturator suburethral sling for the treatment of stress urinary incontinence or prevention of its appearance after prolapse repair. Our results are comparable to those reported in other larger series in terms of operative time, hospital stay and early or late complications.
Pending an evaluation on the long term with larger series, we can include robot assisted colposacropexy among the therapeutic options for symptomatic pelvic floor prolapse repair.
Key words: Laparoscopic colposacropexy. Robotic surgery. Female urinary incontinence. Pelvic organ prolapse surgery.
Introducción
El tratamiento del prolapso mediante promontofijación utilizando material sintético o biológico, permite corregir este tipo de patología de una forma duradera y aunque los resultados son satisfactorios, su universalización no resulta fácil. En la literatura podemos encontrar importantes referencias a la colposacropexia laparoscópica con excelentes resultados anatómicos (95 % sin evidencia de recidiva), pero apenas hay centros que realicen este tipo de tratamiento del prolapso urogenital mediante cirugía robótica. Sea como fuere, el objetivo de este tipo de intervenciones es reestablecer la anatomía, preservar la función urinaria, sexual y reproductora a expensas de una baja morbilidad. La colposacropexia asistida por robot debe ser considerada como tecnología punta. En España, el 20 de Noviembre de 2006, J Moreno Sierra, E Ortiz Oshiroy C Núñez Mora realizaron la primera colposacropexia asistida por robot y desde entonces se viene realizando de forma rutinaria con buenos resultados, debido a una mejor calidad en la visión (tridimensional), unos movimientos quirúrgicos más elegantes, una adecuada estancia media, un mejor control de la hemostasia y sobre todo por ofrecer la posibilidad de llegar a lugares difícilmente accesibles mediante otro tipo de abordajes.
Objetivo
El objetivo de este trabajo es dar a conocer esta novedosa técnica de reconstrucción del suelo pélvico, analizar sus indicaciones y describir nuestra serie y resultados iniciales.
Material y método
Durante el periodo comprendido entre el 20 de noviembre de 2006 hasta la actualidad hemos realizado 10 colposacropexias laparoscopias asistidas por robot en pacientes con una edad media de 62 años (57-77 años).
En todas las pacientes se realizó el mismo protocolo de estudio: anamnesis y exploración física, ecografía urológica (reno-vesical), cistografía miccional y estudio urodinámico. Tan sólo en casos seleccionados (5 pacientes) se consideró oportuna la realización de resonancia magnética del suelo pélvico.
Indicaciones
1. Prolapsos sintomáticos (cistocele, rectocele, prolapso de útero, prolapso de cúpula vaginal).
2. Situaciones especiales:
a. Mujeres jóvenes.
b. Pacientes sexualmente activas.
c. Enfermedades asociadas a tos crónica (bronco-neumopatía crónica obstructiva, asma, etc).
Contraindicaciones
1. Elevado riesgo anestésico.
2. Patologías cardiacas severas.
3. Patología pulmonar severa.
4. Antecedentes de múltiples intervenciones abdominales (contraindicación relativa).
Preparación
1. Evaluación preoperatorio correcta.
a. Historia y exploración física adecuados.
b. Estudio preanestesico.
c. Pruebas complementarias específicas (cistografía, estudio urodinámico y eventualmente resonancia magnética del suelo pélvico).
2. Profilaxis de enfermedad tromboembólica.
a. Dependerá de las características de la paciente.
b. Heparina de bajo peso molecular.
c. Vendaje compresivo de miembros inferiores
3. Profilaxis antibiótica.
a. Celalosporinas de 2ª y 3ª generación.
b. Quinolonas en caso de alergia a los B-lactámicos
Se administran al menos 48 horas, vía parenteral, siendo la primera dosis administrada 30 minutos antes de la intervención. En caso de que la cirugía sea dificultosa o se produzcan lesiones vesico-vaginales la administración de antibiótico deberá prolongarse.
Colocación de la paciente
1. Decúbito supino con los brazos colocados a lo largo del cuerpo y litotomia dorsal.
2. Protección en las zonas de presión con materiales almohadillados o geles.
3. Trendelemburg de aproximadamente 30 grados.
Técnica
1. Anestesia general
2. Iniciamos la intervención colocando una malla suburetral libre de tensión (Uretex-TOT) bien como tratamiento en el caso de que presentara IUE previa, bien como prevención, para evitar su aparición tras haber corregido el prolapso pélvico.
3. Colocación de trócares: en general la colocación será similar a la que se lleva a cabo en la cirugía laparoscópica convencional, con algunas salvedades. (Figura 1).

Trocar de visión directa supra o infraumbilical, dependiendo de las características de la paciente para colocación de la cámara y continuar las punciones con visión directa.
Opcionalmente en algunas escuelas se utiliza inicialmente la aguja de Veress y posteriormente la punción con trócar ciego.
Colocación de los trócares del robot en ambos flancos, habitualmente 2 aunque se puede colocar uno más para el cuarto brazo.
Opcionalmente 2 trócares más para el aspirador y/o instrumentos de hemostasia.
El trócar infraumbilical en línea media que habitualmente se coloca en la laparoscopia convencional no se recomienda en cirugía robótica por interferir con el funcionamiento del brazo de la cámara.
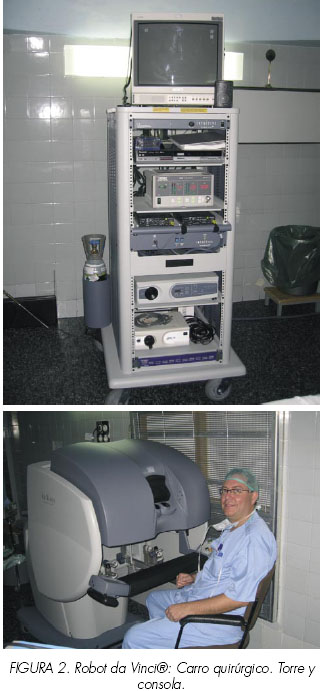
4. En cirugía robótica el cirujano se encuentra en la consola, desde donde ejecutará la intervención (Figura 2).

5. Presión de trabajo (12 mm de Hg).
6. Identificación de estructuras y exposición.
Separación de sigma hacia el hemiabdomen izquierdo y del útero hacia la pelvis menor.
7. Incisión peritoneal sobre la protrusión que se visualiza en el promontorio sacro (Figura 3).

El ayudante realiza una tracción en tienda de campaña.
El cirujano desde la consola realiza una incisión.
Posteriormente el neumoperitoneo facilita la disección.
8. Disección del mesorrecto hacia el ligamento útero sacro derecho.
9. Incisión del fondo de saco de Douglas, desde el ligamento uterosacro derecho hacia el izquierdo para identifican los ligamentos pubococcigeos.
10. Creación de una ventana en el parametrio derecho, a través del ligamento ancho (para posteriormente pasar la malla).
11. Colocación de la malla posterior. Tracción del útero y posterior incisión en la parte posterior del peritoneo subcervical e identificación de recto y músculos elevadores del ano. Colocación de malla (polipropileno o polipropileno recubierto de colágeno acelular) fijada con puntos sueltos de sutura irreabsorbible de dos ceros, a ambos lados del recto en los elevadores y anclada en un punto a la cara posterior vaginal que se identificará mediante la introducción de una valva vaginal.
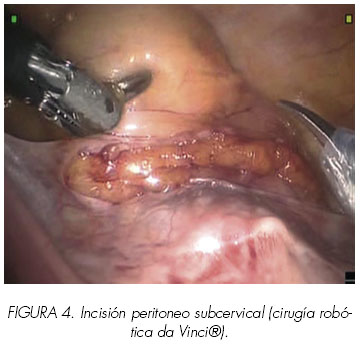
12. Colocación de la malla anterior. En pacientes con útero, este se deja en su posición normal y se realiza una incisión del peritoneo subcervical (Figura 4), liberando la cara anterior y posterior vaginal. Disección del plano avascular intervesicovaginal.
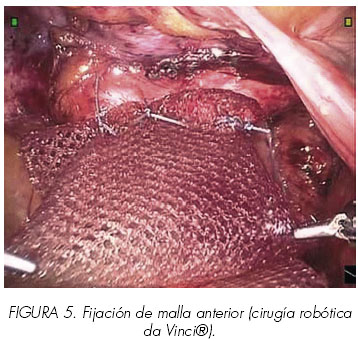
Colocación de una malla (polipropileno o polipropileno recubierto de colágeno acelular, Pelvitex) con puntos sueltos de sutura irreabsorbible de 2 ceros, fijada a las caras anterior y posterior vaginal, así como a la cúpula (Figura 5). Paso de la malla anterior por la ventana creada en el parametrio derecho (Figura 6).

13. Fijación al promontorio sacro. Tracción de mallas anterior y posterior y fijación con puntos al promontorio. En laparoscopia puede realizarse mediante puntos de sutura o mediante la colocación de un tacks (Figura 7) o un punto con nudo extracorporal. En cirugía robótica utilizamos dos o tres puntos de sutura irreabsorbible de 1-2 ceros, con nudo intracorporeo, aplicados al ligamento vertebral anterior.

14. Peritonización. Se realiza con una sutura continua, utilizando material trenzado poliglicolico de 3 ceros.
15. Opcionalmente, puede realizarse una plicatura de los ligamentos uterosacros mediante una culdoplastia de McCall.
16. Cierre de los orificios de los trócares.
Cuidados postoperatorios
1. Tolerancia a las 6 horas.
2. Deambulación a las 12 horas.
3. Retirada de sonda y taponamiento su hubiese precisado a las 24 horas.
4. Alta a las 24-48 horas.
5. Mantener el tratamiento antibiótico durante 48 horas.
6. Controlar el estreñimiento.
7. Evitar las relaciones sexuales durante 1-2 meses.
Resultados preliminares
Desde noviembre de 2006 hasta marzo de 2007 se han llevado a cabo 10 colposacropexias laparoscopias asistidas por Robot en nuestro centro. La edad media de las pacientes es de 62 años. En todas ellas el motivo de consultas fue prolapso urogenital sintomático, y tan sólo en dos pacientes se asociaba la presencia de incontinencia urinaria de esfuerzo (IUE). Destacamos entre los antecedentes personales: histerectomía asociada o no a anexectomía en 4 pacientes (40%), ligadura de trompas en 1 paciente (10%), cirugía previa del prolapso pélvico en 1 paciente. En este caso la paciente presentaba un cistocele grado III a pesar de haber sido intervenida previamente mediante técnicas quirúrgicas tanto vaginales como abdominales. Como antecedentes quirúrgicos destacar: 2 pacientes habían sido intervenidas de apendicectomía, una de colecistectomía litiásica y una de una laparotomía exploradora por obstrucción intestinal.
Como estudio preoperatorio se realizó una correcta anamnesis y exploración física, Cistografía miccional y Estudio Urodinámico. A la exploración física 9 pacientes presentaban cistocele grado III y una grado IV. Una paciente presentaba prolapso del compartimento anterior asociado (enterocele). A la exploración sólo se confirmó la IUE en una de las dos pacientes que la presentaban. En la cistografía se confirmaron los hallazgos exploratorios así como la presencia de IUE en dos pacientes. Los estudios urodinámicos (EUD) informaban la presencia de hiperactividad vesical asintomática en dos pacientes e IUE en una de ellas. Se consideró oportuna la realización de pruebas de imagen complementarias (Resonancia Magnética) en 5 pacientes con los siguientes hallazgos: Cistocele aislado en dos pacientes, prolapso de cúpula en 3 pacientes en una de las cuales se asociaba a enterocele y rectocele (éste último asintomático).
El tiempo de preparación del quirófano ha ido disminuyendo progresivamente, siendo la media de 50 minutos considerando dicho período desde el momento el que el paciente está anestesiado hasta que se inicia la intervención, incluyendo la colocación de la paciente, la preparación de todo el campo quirúrgico y la colocación del Robot. En 8 pacientes se colocó previamente un sling suburetral y transobturatriz (TOT). La duración media de la intervención es de 140 minutos (95-220 minutos) En un caso se produjo una lesión vesical intraoperatoria, que fue diagnosticada en el propio acto quirúrgico siendo reparada sin dificultad. No se produjeron lesiones vaginales ni vasculares.
En el postoperatorio inmediato no se produjeron complicaciones hemorrágicas ni infecciones. Una paciente previamente diagnosticada de artrosis generalizada presentó en el postoperatorio inmediato dolor articular con la movilización del hombro derecho que requirió tratamiento analgésico hasta la completa rehabilitación del mismo. La estancia media de las pacientes fue de 3 días (2-7 días con una mediana de 2 días).
En dos pacientes el ingreso se prolongó durante una semana por motivos médicos ajenos a la intervención (control de coagulación) La sonda fue retirada en 9 pacientes a las 24h sin necesidad de ser recolocada y sólo se prolongó el sondaje en la paciente que sufrió la lesión vesical. Al alta todas las pacientes se encontraban asintomáticas, con buen control analgésico con medicación a demanda. La medicación administrada durante las primeras 24h fue Metamizol Magnésico 2gr iv cada 8 h. Posteriormente se administra Metamizol Magnésico 500mg vo cada 8h sólo si la paciente lo precisa, y se mantiene dicha pauta durante 5 días.
El seguimiento medio es de 2 meses (1-4 meses). Las pacientes son valoradas en consulta al primer y tercer mes de la cirugía. En ningún caso se ha producido recidiva del prolapso pélvico. 8 pacientes se mantienen completamente asintomáticas sin ningún requerimiento analgésico. Dos pacientes refieren molestias vaginales leves que no precisan tratamiento analgésico y en todos los casos está en relación con el sling suburetral.
Discusión
La colposacropexia transabdominal ha demostrado ser una técnica eficaz para la corrección de los prolapsos pélvicos, siendo el abordaje transabdominal el que ha demostrado tener mejores resultados, a pesar de tener un gran inconveniente, como es la morbilidad asociada y el largo periodo de recuperación que precisa. El abordaje laparoscópico, ha supuesto, al igual que para muchas otras intervenciones un gran avance, en lo que a morbilidad quirúrgica y recuperación postquirúrgica se refiere, demostrando además obtener los mismo resultados que con la cirugía convencional. La cirugía laparoscópica asistida por robot, ha venido en los últimos años ha mejorar aún más esos resultados.
La cirugía asistida por robot nos va a permitir tener una mejor visión y por lo tanto una más fácil identificación de las estructuras pélvicas, así como un mejor acceso a las mismas. Otra de sus ventajas, si no la más importante, es el hecho de que permite un manejo mucho más fino y preciso del instrumental, lo que permite una mejor disección y realización de las suturas.
Son muy escasas las series publicadas hasta el momento en cuanto a cirugía laparoscópica asistida por Robot se refieren, del mismo modo que tampoco tenemos datos de seguimiento a largo plazo. La edad media de las pacientes es muy similar en todas las series publicadas. Por otro lado, es posible realizar la intervención con buenos resultados aún en pacientes que han sido intervenidas previamente de cirugía para la incontinencia. En nuestra serie una paciente había sido intervenida previamente para la corrección de prolapso del suelo pélvico, tanto por vía abdominal como por vía vaginal; obteniendo muy buenos resultados tras esta intervención.
La duración de la intervención en nuestro caso es de 140 minutos de media, considerando dicho período desde el momento en que se inicial la cirugía , excluyendo la colocación de los trócares y el Robot, hasta que se cierran las incisiones de la piel. La duración media de la colocación del campo quirúrgico desde que el paciente es anestesiado hasta que están colocados los trócares y se inicia la intervención es de 50 minutos. La suma de ambos tiempos es de 3.16 h y está en relación con los tiempos quirúrgicos publicados en la serie de Elliot y cols., donde informan una duración media de 3.1 horas.
Di Marco y cols. (2004), publican la primera serie de 5 casos con un seguimiento medio de 4 meses. La serie con un seguimiento más largo será la de Elliot y cols. (2006) con una serie de 30 pacientes de las cuales 21 tendrán un seguimiento de al menos 1año. En dicha serie no se informan complicaciones intraoperatorias importantes. En nuestro caso se produjo una lesión vesical que se solventó mediante un cierre primario con puntos sueltos y mantenimiento de sonda vesical durante una semana sin presentar complicaciones posteriores. En el postoperatorio inmediato dos pacientes presentan infección de uno de los trócares que se resuelve con tratamiento antibiótico vía oral. Al cabo de seis meses de la intervención se han informado 1 rectocele grado III, 1 recidiva del prolapso de cúpula y dos mínimas extrusiones de la malla, que fueron reparadas vía vaginal con cierre primario sin presentarse recidiva del prolapso. El seguimiento de nuestra serie es mucho menor con un seguimiento medio de 2 meses.
En la revisión que se realiza un mes tras la cirugía, dos pacientes referían molestias vaginales en relación con el sling suburetral que han cedido progresivamente según refieren en la última revisión. La asociación de una técnica anti-incontinencia profiláctica es controvertida, si bien en nuestro caso hemos optado por colocar en 8 pacientes un sling suburetral transobturatriz previo a la cirugía, en dos de ellas por presentar IUE asociada y en el resto de las pacientes como medida profiláctica para evitar la IUE de novo. Elliot y cols. asocian la colposacropexia a otra técnica anti-incontinencia en un 52% de las pacientes.
Si bien reconocemos las limitaciones de este estudio en cuanto al número de pacientes y seguimiento de los mismos y que por lo tanto los resultados no pueden ser extrapolados a otros centros si consideramos que dichos resultados son lo suficientemente alentadores como para considerar la colposacropexia robótica como una nueva técnica en nuestro arsenal terapéutico, a expensas de evaluaciones más estrictas y a largo plazo.
Conclusiones
La colposacropexia laparoscópica asistida por robot disminuye de forma importante los inconvenientes de la cirugía abierta en cuanto a morbilidad, control analgésico y estancia hospitalaria. Además permite un mejor acceso a la cavidad pélvica, identificación y liberación de estructuras y un control más preciso del instrumental que nos facilitará la ejecución de la técnica.
Parece ser la técnica reconstructiva del suelo pélvico futuro, ya que los resultados a largo plazo parecen ser mejores que los obtenidos por vía vaginal. Sea como fuere el tiempo siempre pone las cosas en su sitio.
Bibliografía y lecturas recomendadas (*lectura de interés y ** lectura fundamental)
1. NEZHAT, C.H.; NEZHAT, F.; NEZHAT, C.: Laparoscopic sacral colpopexy for vaginal vault prolapse. Obstet Gynecol; 84: 885, 1994. [ Links ]
2. DORSEY, J.H.; CUNDIFF, G.: Laparoscopic procedures for incontinence and prolapse. Curr Opin Obstet Gynecol; 6: 223, 1994. [ Links ]
3. DEVAL, B.; FAUCONNIER, A. ; REPIQUET, D. y cols.: Surgical treatment of genitourinary prolapse by the abdominal approach. Apropos of a series of 232 cases. Ann. Chir.; 5:256, 1997. [ Links ]
**4. WATTIEZ, A.; CANIS, M.; MAGE, G. y cols.: Promontofixation for the treatment of prolapse. Urol. Clin. North Am.; 28: 151, 2001. [ Links ]
5. VISCO, A.G.; WEIDNER, A.C.; BARBER, M.D.: Vaginal mesh erosion after abdominal sacral colpopexy. Am. J. Obstet. gynecol; 184: 297, 2001. [ Links ]
*6. VON THEOBALD, P.: Laparoscopic promontofixation. J. Chir.; 138: 353, 2001. [ Links ]
**7. WATTIEZ, A.; CANIS, M. y cols.: Promontofixation for the treatment of prolapse. Urol. Clin. North Am.; 28:151, 2001. [ Links ]
8. REDDY, K.; MALIK, T.: Short-term and long-term follow-up of abdominal sacrocolpopexy for vaginal vault prolapse: initial experience in a district general hospital. J. Obstet. Gynaecol.; 22:532, 2002. [ Links ]
*9. GADONNEIX, P.; ERCOLI, A.; SCAMBIA, G. y cols.: The use of laparoscopic sacrocolpopexy in the manegement of pelvic organ prolapse. Curr. Opin. Obstet. Gynecol.; 17: 376, 2005. [ Links ]
*10. MOTTRIE, A.; MARTENS, P.; BOLLENS, R. y cols.: Laparoscopic colpopromontofixation. Actuelle Urologie; 36: 1, 2005. [ Links ]
**11. ELLIOT, D.S y CHOW, G.K.: Traitment du prolapsus du dôme vaginal par sacrocolpopexia laparoscopique assistée par robot. EMC. Techiques chirurgicales-Urologie, 41-363-D. Elsevier Masson 2006. [ Links ]
**12. MORENO, J.: Editorial. Seclaendosurgery.com, nº 18, 2007. ISSN 1698-4412 [ Links ]
**13. DEL POZO ROSELLÓ, J.; GÓMEZ SUGRAÑEZ, M.T.: Colposacropexia por laparoscopia. Pag 653-671. Atlas de Incontinencia Urinaria y Suelo Pélvico. Editor: Jesús Moreno Sierra. ISBN-13: 978-84-690-3999-1. [ Links ]
**14. MORENO SIERRA, J.; MOTTRIE, A.; ORTIZ OSHIRO, E. y cols.: Tratamiento del prolapso urogenital mediante colposacropexia laparoscópica y robot-asistida. Atlas de Incontinencia Urinaria y Suelo Pélvico. Pag 673-681 Editor: J. Moreno Sierra y A. Silmi Moyano. ISBN-13: 978, 2007. [ Links ]
*15. RASSWEILER, J.; TEBER, D.; DE LA ROSETTE, J. y cols.: Laparoscopic pelvic surgery: where do we stand in the year 2006? Urologue; 45: 1135, 1138, 2006. [ Links ]
16. ELLIOT, D.S.; KRAMBECK, A.E.; CHOW, G.K.: Long-Term results of robotic assisted laparoscopic sacrocolpopexy for the treatment of high grade vaginal vault prolapse. J. Urol. 176: 655, 2006. [ Links ]
17. ELLIOT, D.S.; CHOW, G.K.; GETTMAN, M.: Current status of robotics in female urology and gynecology. World J. Urol. 24: 188, 2006. [ Links ]
18. ELLIOT, D.S.; IGOR. F.; DI MARCO, D. y cols.: Gynecologic use of robotically assisted laparoscopy: sacrocolpopexy for the treatment of high-grade vaginal vault prolapse. Am. J. Surg. (188): 52, 2004. [ Links ]
19. DI MARCO, D.; CHOW, G.K.; GETTMAN, M. y cols.: Robotic-Assisted laparoscopic sacrocolpopexy for treatment of vagnal vault prolapse. Urology (63): 373, 2004. [ Links ]
![]() Dirección para correspondencia:
Dirección para correspondencia:
Jesús Moreno Sierra
Servicio de Urología
Hospital Clínico San Carlos
c) Martín Lagos s/n
28040 Madrid (España)
dr_jmoreno@hotmail.com

