










Mi SciELO
 Servicios personalizados
Servicios personalizadosServicios Personalizados
Revista
Articulo
 texto en
texto en  Inglés (pdf)
Inglés (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares en
SciELO
Similares en
SciELO -
 Similares en Google
Similares en Google
Compartir

 Permalink
PermalinkArchivos Españoles de Urología (Ed. impresa)
versión impresa ISSN 0004-0614
Arch. Esp. Urol. vol.60 no.4 may. 2007
Robotic surgery in pediatric urology.
Carlos R. Estrada and Carlo C. Passerotti.
Childrens Hospital Boston & Harvard Medical School. Boston. MA. USA.
SUMMARY
Objectives: To review the use of robotic surgery in pediatric urology and provide a platform from which discussions regarding this technology can arise.
Methods: The available literature and the experience at the authors institution were reviewed to examine the applications of robotic surgery in pediatric urology. MEDLINE was queried using the following key words: robot, robotic, laparoscopy, surgery, child, and pediatrics.
Results: The available literature is comprised mainly of case reports and case series. Two groups have published small analyses comparing robotic assisted laparoscopic pyeloplasty and open pyeloplasty. At our institution, we have utilized the daVinci robotic surgical system to perform the following surgical procedures: orchidopexy of the intraabdominal testis, total and partial nephrectomy, dismembered pyeloplasty, pyelolithotomy, excision of calyceal diverticula, ureteroureterostomy, ureteropyelostomy, intra- and extravesical ureteral reimplantation, megaureter tapering and reimplantation, adrenelectomy, creation of a Mitrofanoff continent catheterizable channel, and resection of pelvic Mullerian remnants.
Conclusions: Robotic surgery in pediatric urology is an evolving technology that holds promise for application to most urological surgeries. Refinements in equipment will improve the efficiency of these systems. Ultimately, the efficacy and role of robotic surgical systems need to be defined with rigorous prospective studies that provide comparisons to gold standard techniques, be they open surgery or conventional laparoscopy.
Key words: Pediatric. Laparoscopy. Robotic. Surgery.
Introduction
Pediatric urology was introduced to laparoscopic surgery in the late 1970s by Cortesi et al who described its utility in the evaluation of nonpalpable testes.(1) Since then, conventional laparoscopic approaches have been utilized for numerous pediatric urological surgeries, including orchidopexy of the intrabdominal testis(2-15), varicocelectomy(16-23), total and partial nephrectomy(24-33), pyeloplasty(34-40), ureteral reimplantation(41, 42), and bladder reconstructive surgery(43-45). Despite the breadth of these reported procedures, pediatric urologists have used conventional laparoscopy primarily in the setting of diagnostic or extirpative surgery and for the management of the intraabdominal testis. These types of cases share the feature of not typically requiring intracorporeal suturing, which significantly reduces their technical demand. Certainly, the advanced skills necessary for urological laparoscopic reconstructive surgery are attainable, but the learning curve is typically steep(46).
Robotic, or computer-assisted(47), surgical devices were introduced with the promises of improved visualization, control, precision, and a reduced learning curve as compared to conventional laparoscopy. The currently available robotic surgical system, the daVinci (Intuitive Surgical, Sunnyvale, CA), has largely realized these, and has provided a means for even laparoscopically inexperienced surgeons to perform complex reconstructive procedures. In addition, the technology provides an opportunity to apply new techniques to practice and for the experienced laparoscopic surgeon to improve their capacity.(48) These benefits are owed to the three-dimensional visualization, the tremor-filtered instrumentation, the scalability of movements, and the six degrees of freedom that the system provides.
The most widely performed pediatric robotic-assisted laparoscopic surgery is the dismembered pyeloplasty. The clinical efficacy of this procedure has been demonstrated in a recent study comparing age-matched cohorts undergoing open pyeloplasty and robotic-assisted laparoscopic pyeloplasty.(49) The available data for other applications of the daVinci robotic system in pediatric urology are limited, but our group and others have performed a variety of other procedures, including orchidopexy of the intraabdominal testis, total and partial nephrectomy, dismembered pyeloplasty, pyelolithotomy, excision of calyceal diverticula, ureteroureterostomy, ureteropyelostomy, intra- and extravesical ureteral reimplantation, megaureter tapering and reimplantation, adrenelectomy, creation of a Mitrofanoff continent catheterizable channel, and resection of pelvic Mullerian remnants. The benefits of the robotic system in the above-mentioned surgeries that do not require intracoporeal suturing are modest, but include ease of use for the less experienced laparoscopist and improved visualization.
The general application of the robotic system to pediatric surgery has been aided by the development of the smaller 5 mm working instruments. (Figure 1) These provide a significant advantage over the larger 8 mm instruments when working in the smaller spaces and on the smaller structures that often attend pediatric urology. In addition, a 5 mm endoscope is also available, but the three-dimensional visualization is limited to the 12 mm endoscope.

This article reviews the available literature and the experience at the authors institution to describe robotic surgery in pediatric urology. In doing so, it is our hope that we may provide a complete and concise reference as well as a platform from which academic discussions regarding robotic surgery in pediatric urology can arise.
Materials and method
Robotic surgery in pediatric urology is in its relative infancy. To address the state of the art, the available literature and the experience at the authors institution were reviewed.
The literature was searched using the MEDLINE, which was queried using the following key words: robot, robotic, surgery, laparoscopy, child, and pediatrics.
At the authors institution the following surgeries have been performed robotically: orchidopexy of the intraabdominal testis, total and partial nephrectomy, dismembered pyeloplasty, pyelolithotomy, excision of calyceal diverticula, ureteroureterostomy, ureteropyelostomy, intra- and extravesical ureteral reimplantation, megaureter tapering and reimplantation, adrenelectomy, creation of a Mitrofanoff continent catheterizable channel, and resection of pelvic Mullerian remnants. We will describe our two most commonly performed robotic surgeries in detail: the dismembered pyeloplasty and the extravesical ureteral reimplantation.
Results and discussion
Review of the Literature
The reporting of robotic surgery in pediatric urology is limited. There are five original manuscripts(35, 49-52), four case reports(53-56), and several review articles(48, 57) available in the literature. Of the five original manuscripts, four address robotic assisted laparoscopic pyeloplasty. Given the degree of difficulty of the conventional laparoscopic pyeloplasty and the frequency with which pediatric urologists address ureteropelvic junction (UPJ) obstruction, the advantages afforded by the robotic system make the robotic pyeloplasty an appealing option and the natural subject of most research.
The robotic assisted laparoscopic pyeloplasty was first reported in 2005 by Atug and colleagues.(50) In their initial report, seven patients aged 6 to 15 years underwent robotic assisted laparoscopic pyeloplasty. In limited follow-up (mean 10.9 months), six of seven evaluable patients had improved drainage, symptom resolution, and no evidence of obstruction. They concluded that the robotic pyeloplasty allows for comparable results to open pyeloplasty. Kutikov et al reported their experience with robotic pyeloplasty in infants with a mean age of 5.6 months. They reported short (mean 122 minutes) operative times and no complications. Of the nine patients, seven (78%) had resolution or improvement of hydronephrosis, and all patients had no evidence of obstruction on postoperative diuretic renal scan. They concluded that robotic pyeloplasty is a safe and feasible approach even in the infant who requires an intervention for UPJ obstruction.
In 2006, two groups reported comparisons of robotic pyeloplasty with open pyeloplasty. Lee et al performed a retrospective age-matched case-control study of 33 patients undergoing robotic pyeloplasty and 33 undergoing open pyeloplasty.(49) They reported that the robotic approach was associated with decreased hospital stay, decreased narcotic use, and operative times approaching those of open surgery. In a mean follow-up of 10 months, 31 of 33 (94%) patients had successful outcomes in the robotic pyeloplasty group. This compared to 100% of patients with successful outcomes in the open cohort at a mean follow-up of 21 months. Although in a limited follow-up period, this analysis demonstrates the relative efficacy of the robotic pyeloplasty. Similar results were reported by Yee et al who also compared age-matched cohorts undergoing robotic pyeloplasty (N=8) and open pyeloplasty (N=8).(35) Like Lee et al, they reported that robotic pyeloplasty is associated with decreased length of hospital stay and reduced narcotic use. Unlike the previous study, these authors reported a significantly longer operative time. In a mean follow-up period of 14.7 months, all patients in both groups had successful outcomes.
These data are encouraging, and indicate that robotic assisted laparoscopic pyeloplasty is an emerging technique that holds much promise. Certainly, long term studies are needed to thoroughly examine the efficacy of this technology. Rigorous prospective trials comparing open, laparoscopic, and robotic pyeloplasty would be ideal, but would be difficult to realize. Reliance on retrospective analyses characterizes a large portion of the surgical literature, and if they are well-conceived, well-controlled, and thorough, these studies may define future urological practice. Indeed, rigorous studies are needed for every reported and conceivable robotic application. Unfortunately, the limited number of pediatric centers with access to robotic equipment will delay this requirement. As the technology is diffusely acquired and the current centers accumulate cases, the collective experience in the pediatric urological community will need to be compared and synthesized to provide reliable recommendations.
Experience at Childrens Hospital Boston
Here we provide detailed descriptions of two robotically assisted laparoscopic procedures that we have performed at our institution since acquiring the daVinci system in 2001: dismembered pyeloplasty and extravesical ureteral reimplantation.
Pyeloplasty (Figure 2)

Robotic assisted laparoscopic pyeloplasty can be performed via a transperitoneal or retroperitoneal approach. We have utilized the transperitoneal approach almost exclusively; the single case that was performed via a retroperitoneal approach was technically difficult because of the small working space and lower pole crossing vessels were missed resulting in an unsuccessful repair. For the transperitoneal approach, the patient is anesthetized, a Foley catheter is placed, and the patient is placed in the supine position. A 30 degree wedge is placed under the side of the UPJ to be repaired and the patient is secured to the table. The patient is then prepared from the xyphoid process to the pubic symphysis. Three ports are placed: an umbilical camera port, a midline working port between the umbilicus and xyphoid process, and the second working port at the midclavicular line below the umbilicus. We prefer the open technique for placement of the first port, and a puncture technique for the working ports. We secure all the ports with fascial sutures that are ultimately used to close the fascia. A fourth port may be placed for aid in retraction, needle exchanges, etc., but we have found it unnecessary. In addition, for daVinci systems equipped with a fourth robotic arm, a third working port may be placed for its utilization. Our robotic systems, however, are the original three armed systems and therefore we do not have experience with a fourth robotic arm.
After port placement, the patient is tilted 60 degrees and the robot is docked over the patients ipsilateral shoulder. Exposure of the UPJ is accomplished via a trans-mesenteric approach on the left, or with mobilization of the colon on either side. The dissection of the ureter and renal pelvis is then performed in the same fashion as would be in open surgery. In addition, the same principles of gentle and minimal tissue handling are strictly adhered to. To aid in visualization and reconstruction of the UPJ, a hitch stitch is placed through the renal pelvis to elevate it. This stitch can be advanced through the abdominal wall and secured outside the patient with adjustments performed by the patient-side assistant surgeon, or it can be secured to the abdominal wall internally.
The renal pelvis is then incised and the ureter is immediately spatulated laterally to preserve ones orientation. The ureteropelvic anastomosis is performed using 5-0, 6-0, or 7-0 absorbable suture material. Interrupted or running suture may be used. After the posterior aspect of the anastomosis is complete, drainage of the repair should be considered. We have routinely drained our robotic pyeloplasties using ureteral JJ stents. The stent may be placed in an antegrade fashion following introduction of the stent into the abdominal cavity via a large-bore angiocatheter. The appropriately sized JJ stent is advanced down the ureter over a guide wire. The guidewire is then removed and the proximal portion of the stent is placed in the renal pelvis. To confirm its correct placement, the bladder may be filled with diluted methylene blue and reflux of the dye should be seen at the level of proximal end of the stent. Alternatively, the stent may be placed immediately prior to the robotic surgery via a retrograde cystoscopic approach. In almost all cases, we utilize the antegrade placement technique. Following stent placement, the remainder of the anastomosis is completed. Another possible option for drainage of the repair is the utilization of the kidney internal splint/stent (KISS) catheter(58). This approach provides percutaneous drainage while allowing antegrade flow of urine through the repair, with the option of performing antegrade contrast studies. We do not routinely use penrose drains.
Postoperatively, the Foley catheter is removed in 24 hours and most patients are ready for discharge to home on postoperative one or two. If a JJ ureteral stent is left in place, it is removed in approximately 4 weeks. The results of this approach at our institution and at others are excellent and comparable to those of open surgery.(35, 49, 50, 52)
Extravesical Ureteral Reimplantation (Figure 3)
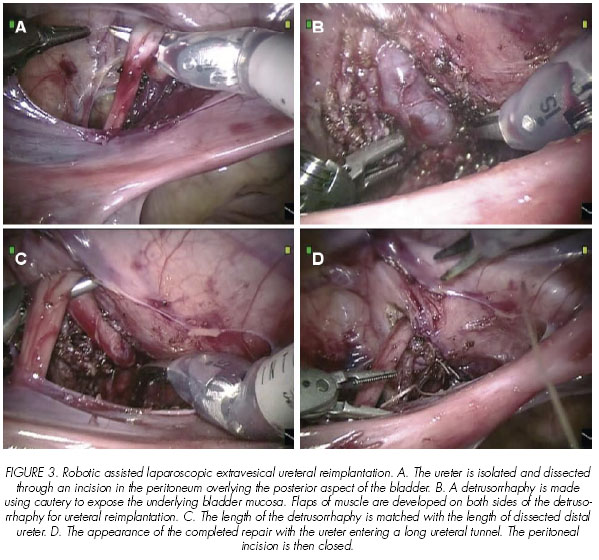
Extravesical ureteral reimplantation is performed essentially as it is performed in the open Lich-Gregoir technique. Robotically, it can be performed unilaterally or bilaterally. Unlike in the open bilateral Lich-Gregoir, we have not experienced postoperative urinary retention as a complication (unpublished observation).
The anesthetized patient is placed supine on the operating table. The legs are spread widely, and the patient is then prepared from the xyphoid process to the perineum. A Foley catheter is placed after draping for access during the operation. As with our other robotic surgeries, we prefer to place the umbilical camera port using an open technique. Two working ports are placed in the midclavicular line approximately 1 cm below the level of the umbilicus. All ports are secured with abdominal wall sutures that are used to close the fascia at the end of the case. The patient is then placed in Trendelenburg, and the robot is docked over the patients feet. The bowel is moved cephalad to expose the peritoneal lining of the pelvis, and a transverse incision is made in the peritoneum anterior to uterus and over the posterior wall of the bladder. The ureter is located lateral to the bladder and is dissected for a length of 4- 6 cm with care to maintain its blood supply intact. A hitch stitch is placed in the posterior wall of the bladder and fixed to the anterior abdominal wall to assist in exposure for the development of the detrusorrhaphy.
The detrusorrhaphy is created as it is in the open Lich Gregoir technique. The detrusor is incised with cautery down to the level of the mucosa, which should remain intact. If a perforation of the mucosa is encountered it is closed with a 5-0 chromic suture. The length of the tunnel should be sufficient to cover the length of the dissected distal ureter, and 3 -4 cm is typically sufficient. Muscle flaps are created on both sides of the detrusorrhaphy, and are closed over the ureter with 4-0 polyglactin (Vicryl) interrupted sutures. Closure may proceed from distal to proximal or proximal to distal. Care must be taken to not close the tunnel too tightly and to not kink the ureter, both of which can result in ureteral obstruction. The peritoneal incision is then closed with a running absorbable suture.
Postoperatively, a Foley catheter is not necessary unless a mucosal perforation was encountered, in which case a catheter remains for 24 hours. Patients may be ready to be discharged to home on the day of surgery or on postoperative day one.
Conclusions
Robotic surgery in pediatric urology is an evolving discipline that appears to hold great promise. It allows precise reconstruction of the most delicate tissues in a manner that appears to benefit both the patient and his/her family. The efficacy and efficiency of robotic surgery in our field still need to be defined, and well-conceived, -constructed, and executed studies are required to define its role. Refinements in equipment as well as increased international availability will permit and encourage wider usage and confirm the relatively small collective experience currently reported.
Acknowledgements
The authors are indebted to Dr. Craig Peters, who pioneered laparoscopic and robotic surgery at Childrens Hospital Boston. A large portion of the experience at our institution is his, and his guidance and innovation have trained and inspired the next generation of Boston-trained pediatric urologists to pursue minimally invasive surgery.
![]() Correspondence:
Correspondence:
Carlos R. Estrada, M.D.
Childrens Hospital Boston
Dept. of Urology
300 Longwood Avenue, HU390
Boston, MA 02115. USA.
carlos.estrada@childrens.harvard.edu
References and recommended readings (*of special interest, **of outstanding interest)
*1. CORTESI, N.; FERRARI, P.; ZAMBARDA, E. y cols.: Diagnosis of bilateral abdominal cryptorchidism by laparoscopy. Endoscopy, 8: 33, 1976. [ Links ]
*2. ABOLYOSR, A.: Laparoscopic versus open orchiopexy in the management of abdominal testis: a descriptive study. Int. J. Urol., 13: 1421, 2006. [ Links ]
*3. ESPOSITO, C.; DAMIANO, R.; GONZALEZ SABIN, M.A. y cols.: Laparoscopy-assisted orchidopexy: an ideal treatment for children with intra-abdominal testes. J. Endourol., 16: 659, 2002. [ Links ]
*4. ESPOSITO, C.; GARIPOLI, V.: The value of 2-step laparoscopic Fowler-Stephens orchiopexy for intra-abdominal testes. J. Urol., 158: 1952, 1997. [ Links ]
*5. GILL, I.S.; ROSS, J.H.; SUNG, G.T. y cols.: Needlescopic surgery for cryptorchidism: the initial series. J. Pediatr. Surg., 35: 1426, 2000. [ Links ]
*6. HAY, S.A.; SOLIMAN, H.A.; ABDEL RAHMAN, A.H. y cols.: Laparoscopic classification and treatment of the impalpable testis. Pediatr. Surg. Int., 15: 570, 1999. [ Links ]
*7. HUMKE, U.; SIEMER, S.; BONNET, L. y cols.: Pediatric laparoscopy for nonpalpable testes with new miniaturized instruments. J. Endourol., 12: 445, 1998. [ Links ]
*8. LAW, G.S.; PEREZ, L.M.; JOSEPH, D.B.: Two-stage Fowler-Stephens orchiopexy with laparoscopic clipping of the spermatic vessels. J. Urol., 158: 1205,1997. [ Links ]
*9. LINDGREN, B.W.; DARBY, E.C.; FAIELLA, L. y cols.: Laparoscopic orchiopexy: procedure of choice for the nonpalpable testis?. J. Urol., 159: 2132, 1998. [ Links ]
*10. PAPPARELLA, A.; PARMEGGIANI, P.; COBELLIS, G. y cols.: Laparoscopic management of nonpalpable testes: a multicenter study of the Italian Society of Video Surgery in Infancy. J. Pediatr. Surg., 40: 696, 2005. [ Links ]
*11. POENARU, D.; HOMSY, Y.L.; PELOQUIN, F. y cols.: Laparoscopic management of the impalpable abdominal testis. Urology, 42: 574, 1993. [ Links ]
*12. RADMAYR, C.; OSWALD, J.; SCHWENTNER, C. y cols.: Long-term outcome of laparoscopically managed nonpalpable testes. J. Urol., 170: 2409, 2003. [ Links ]
*13. SAMADI, A.A.; PALMER, L.S.; FRANCO, I.: Laparoscopic orchiopexy: report of 203 cases with review of diagnosis, operative technique, and lessons learned. J. Endourol., 17: 365, 2003. [ Links ]
*14. TACKETT, L.D.; WACKSMAN, J.; BILLMIRE, D. y cols.: The high intra-abdominal testis: technique and long-term success of laparoscopic testicular autotransplantation. J. Endourol., 16: 359, 2002. [ Links ]
*15. WACKSMAN, J.; BILLMIRE, D.A.; LEWIS, A.G. y cols.: Laparoscopically assisted testicular autotransplantation for management of the intraabdominal undescended testis. J. Urol. 156: 772, 1996. [ Links ]
*16. BARQAWI, A.; FURNESS, P.; KOYLE, M.: Laparoscopic Palomo varicocelectomy in the adolescent is safe after previous ipsilateral inguinal surgery. BJU Int., 89: 269, 2002. [ Links ]
*17. ESPOSITO, C.; MONGUZZI, G.; GONZALEZ-SABIN, M.A. y cols.: Results and complications of laparoscopic surgery for pediatric varicocele. J. Pediatr. Surg. 36: 767, 2001. [ Links ]
*18. ESPOSITO, C.; MONGUZZI, G.L.; GONZALEZ- SABIN, M.A. y cols.: Laparoscopic treatment of pediatric varicocele: a multicenter study of the italian society of video surgery in infancy. J. Urol., 163: 1944, 2000. [ Links ]
*19. KOYLE, M.A.; OOTTAMASATHIEN, S.; BARQAWI, A. y cols.: Laparoscopic Palomo varicocele ligation in children and adolescents: results of 103 cases. J. Urol., 172: 1749, 2004. [ Links ]
*20. NG, W.T.; WONG, M.K.; BOOK, K.S. y cols.: Laparoscopic varicocelectomy in pediatric patients. Urology, 46: 121, 1995. [ Links ]
*21. PINTUS, C.; RODRIGUEZ MATAS, M.J.; MANZONI, C. y cols.: Varicocele in pediatric patients: comparative assessment of different therapeutic approaches. Urology, 57: 154, 2001. [ Links ]
*22. PODDOUBNYI, I.V.; DRONOV, A.F.; KOVARSKII, S.L. y cols.: Laparoscopic ligation of testicular veins for varicocele in children. A report of 180 cases. Surg. Endosc., 14: 1107, 2000. [ Links ]
*23. SUN, N.; CHEUNG, T.T.; KHONG, P.L. y cols.: Varicocele: Laparoscopic clipping and color Doppler follow-up. J. Pediatr. Surg., 36: 1704, 2001. [ Links ]
*24. CHEE-AWAI, R.A.; CHANDHOKE, P.S.; KOYLE, M.A.: Laparoscopic nephrectomy in children. Semin. Laparosc. Surg., 5: 47, 1998. [ Links ]
*25. DAS, S.; KEIZUR, J.J.; TASHIMA, M.: Laparoscopic nephroureterectomy for end-stage reflux nephropathy in a child. Surg. Laparosc. Endosc., 3: 462, 1993. [ Links ]
*26. DIAMOND, D.A.; PRICE, H.M.; McDOUGALL, E.M. y cols.: Retroperitoneal laparoscopic nephrectomy in children. J. Urol., 153: 1966, 1995. [ Links ]
*27. EL-GHONEIMI, A.; VALLA, J.S.; STEYAERT, H. y cols.: Laparoscopic renal surgery via a retroperitoneal approach in children. J. Urol., 160: 1138, 1998. [ Links ]
*28. FIGENSHAU, R.S.; CLAYMAN, R.V.; KERBL, K. y cols.: Laparoscopic nephroureterectomy in the child: initial case report. J. Urol., 151: 740, 1994. [ Links ]
*29. JANETSCHEK, G.; SEIBOLD, J.; RADMAYR, C. y cols.: Laparoscopic heminephroureterectomy in pediatric patients. J. Urol., 158: 1928, 1997. [ Links ]
*30. SYDORAK, R.M.; SHAUL, D.B.: Laparoscopic partial nephrectomy in infants and toddlers. J. Pediatr. Surg., 40: 1945, 2005. [ Links ]
*31. YAO, D.; POPPAS, D.P.: A clinical series of laparoscopic nephrectomy, nephroureterectomy and heminephroureterectomy in the pediatric population. J. Urol., 163: 1531, 2000. [ Links ]
*32. LEE, R.S.; RETIK, A.B.; BORER. J.G. y cols.: Pediatric retroperitoneal laparoscopic partial nephrectomy: comparison with an age matched cohort of open surgery. J. Urol., 174: 708, 2005. [ Links ]
*33. KOYLE, M.A.; WOO, H.H.; KAVOUSSI, L.R.: Laparoscopic nephrectomy in the first year of life. J. Pediatr. Surg., 28: 693, 1993. [ Links ]
*34. KUTIKOV, A.; RESNICK, M.; CASALE, P.: Laparoscopic pyeloplasty in the infant younger than 6 months--is it technically possible?. J. Urol. 175: 1477, 2006. [ Links ]
**35. YEE, D.S.; SHANBERG, A.M.; DUEL, B.P. y cols.: Initial comparison of robotic-assisted laparoscopic versus open pyeloplasty in children. Urology, 67: 599, 2006. [ Links ]
*36. SCHWAB, C.W.; HYUN, G.; GARIBAY-GONZALEZ, F. y cols.: Transperitoneal laparoscopic pyeloplasty for pelvic kidneys with ureteropelvic junction obstruction in children: technique and preliminary outcomes. Jsls, 10: 307, 2006. [ Links ]
*37. SCHWAB, C.W.; CASALE, P.: Bilateral dismembered laparoscopic pediatric pyeloplasty via a transperitoneal 4-port approach. J. Urol., 174: 1091, 2005. [ Links ]
*38. SCHIER, F.: Laparoscopic Anderson-Hynes pyeloplasty in children. Pediatr. Surg. Int., 13: 497, 1998. [ Links ]
*39. PETERS, C.A.; SCHLUSSEL, R.N.; RETIK, A.B.: Pediatric laparoscopic dismembered pyeloplasty. J. Urol., 153: 1962, 1995. [ Links ]
*40. METZELDER, M.L.; SCHIER, F.; PETERSEN, C. y cols.: Laparoscopic transabdominal pyeloplasty in children is feasible irrespective of age. J. Urol., 175: 688, 2006. [ Links ]
*41. BALDWIN, D.D.; POPE, J.C.; ALBERTS, G.L. y cols.: Simplified technique for laparoscopic extravesical ureteral reimplantation in the porcine model. J. Endourol., 19: 502, 2005. [ Links ]
*42. EHRLICH, R.M.; GERSHMAN, A.; FUCHS, G.: Laparoscopic vesicoureteroplasty in children: initial case reports. Urology, 43: 255, 1994. [ Links ]
*43. POPPAS, D.P.; UZZO, R.G.; BRITANISKY, R.G. y cols.: Laparoscopic laser assisted auto-augmentation of the pediatric neurogenic bladder: early experience with urodynamic followup. J. Urol., 155: 1057, 1996. [ Links ]
*44. KOK, K.Y.; SENEVIRATNE, H.S.; CHUA, H.B. y cols.: Laparoscopic excision of congenital bladder diverticulum in a child. Surg. Endosc., 14: 501, 2000. [ Links ]
45. HEDICAN, S.P.; SCHULAM, P.G.; DOCIMO, S.G.: Laparoscopic assisted reconstructive surgery. J. Urol., 161: 267, 1999. [ Links ]
46. PETERS, C.: Laparoscopy in paediatric urology: adoption of innovative technology. BJU Int., 92: 52, 2003. [ Links ]
**47. GUILLONNEAU, B.: What robotics in urology? A current point of view. Eur. Urol., 43: 103, 2003. [ Links ]
**48. PASSEROTTI, C.; PETERS, C.A.: Robotic-assisted laparoscopy applied to reconstructive surgeries in children. World J. Urol., 24: 193, 2006. [ Links ]
**49. LEE, R.S.; RETIK, A.B.; BORER, J.G. y cols.: Pediatric robot assisted laparoscopic dismembered pyeloplasty: comparison with a cohort of open surgery. J. Urol., 175: 683, 2006. [ Links ]
**50. ATUG, F.; WOODS, M.; BURGESS, S.V. y cols.: Robotic assisted laparoscopic pyeloplasty in children. J. Urol., 174: 1440, 2005. [ Links ]
**51. PETERS, C.A.; WOO, R.: Intravesical robotically assisted bilateral ureteral reimplantation. J. Endourol., 19: 618, 2005. [ Links ]
**52. KUTIKOV, A.; NGUYEN, M.; GUZZO, T. y cols.: Robot assisted pyeloplasty in the infant-lessons learned. J. Urol., 176: 2237, 2006. [ Links ]
*53. PEDRAZA, R.; PALMER, L.; MOSS, V. y cols.: Bilateral robotic assisted laparoscopic heminephroureterectomy. J. Urol., 171: 2394, 2004. [ Links ]
*54. YEE, D.S.; KLEIN, R.B.; SHANBERG, A.M.: Case report: robot-assisted laparoscopic reconstruction of a ureteropelvic junction disruption. J. Endourol., 20: 326, 2006. [ Links ]
*55. YEE, D.S.; SHANBERG, A.M.: Robotic-assisted laparoscopic ureteroureterostomy in an adolescent with an obstructed upper pole system and crossed renal ectopia with fusion. Urology, 68: 673, 2006. [ Links ]
*56. PEDRAZA, R.; WEISER, A.; FRANCO, I.: Laparoscopic appendicovesicostomy (Mitrofanoff procedure) in a child using the Da Vinci robotic system. J. Urol., 171: 1652, 2004. [ Links ]
*57. LEE, R.S.; BORER, J.G.: Robotic surgery for ureteropelvic junction obstruction. Curr. Opin. Urol., 16: 291, 2006. [ Links ]
*58. ZRITCHIE, E.; REISMAN, E.M.; ZAONTZ, M.R. y cols.: Use of kidney internal splint/stent (KISS) catheter in urinary diversion after pyeloplasty. Urology, 42: 55, 1993. [ Links ]

