









 Custom services
Custom services
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
PermalinkINTRODUCCIÓN
Para el abordaje de la problemática de la robótica del cuidado se antoja necesario la conceptualización u orientación de la misma hacia las personas. Se requiere entonces encuadrar la robótica del cuidado a través de la argumentación teórica que las bases en las que se sustenta.
Del Origen de la Vida a la constitución de la persona.
Aproximarse a la conceptualización de la persona requiere del conocimiento de aquellos mecanismos primigenios que conforman la vida; concepto proveniente del latín vita. (1)
Desde el punto de vista biológico se han de remarcar los postulados aristotélicos (2) y la evolución darwiniana (3) como principales hitos mientras que, desde el punto de vista físico, Schrödinger (4) expresa que la vida parece ser el comportamiento ordenador y reglamentado de la materia. El Origen de la Vida ha sido objeto de estudio por parte de la física (5,6), pero también de la teología como exponen el Genésis (7) y el Yin-Yang que va de la vida a la muerte, conceptos opuestos, embebido uno en otro. (8)
La RAE (1) en una de sus acepciones acerca de vida la define como ser vivo lo que nos lleva a la conceptualización del ser humano como “ser racional” con capacidad de entendimiento: razón humana, inteligencia y sentido. (1,9)
A lo largo de la historia, la humanidad ha intentado aproximarse a la esencia del hombre. (10) (11) Desde la Democracia griega y el ser de participación a la conceptualización actual en base a la Declaración Universal de Derechos Humanos de 1948 (12) que remarca la igualdad en deberes y derechos. En este contexto histórico adquiere relevancia la conceptualización de la persona desde el punto de vista existencialista lo cual Heidegger reflejaría en su Dasein (13) (14), esto es, el ser-ahí partiendo entonces de una hermenéutica del existir (15) siendo “el vivir el modo de ser radical” desde el pensamiento orteguiano (16). Esta perspectiva existencialista (17) ha sido influencia notable entre las maestras de la disciplina científica enfermera (18). Ejemplo de ello es la identificación de vida como proceso dinámico dado por Martha Rogers (19) o resaltar la cultura como sustrato en el que se da la vida como postularía Madeleine Leininger. (18)
De la preocupación a la ocupación: el ciclo del cuidado a uno mismo.
Tal y como estableció Heidegger en su obra Ser y Tiempo (13): “desde el punto de vista existencial, el cuidado se encuentra a priori, antes de toda actitud y situación del ser humano, lo que significa que el cuidado está presente en toda actitud y situación de hecho”. (16) En palabras de Ortega y Gasset y, en relación con el anterior pilar, vida es cuidado, a lo cual él prefiere denominar preocupación y lo es siempre, dado que en cada instante tenemos que decidir lo que vamos a hacer en el siguiente, lo que va a ocupar nuestra vida. (16) Siguiendo esa línea, desde la perspectiva filosófica el cuidado de uno mismo (20) ha sido objeto de estudio a través del pensamiento griego (21,22), la tradición judeocristiana (23) hasta llegar a los recientes postulados de Foucault. (20)
Por su parte, desde la disciplina científica enfermera se resalta la definición de cuidado de Collière (24) como acto de vida para el mantenimiento de la misma distinguiéndose dos tipos de cuidado: cuidado autónomo (innato y reflejo) y consciente (autocuidado y anticuidado). (25) (26) (27)
La robótica del cuidado en el entorno de la Inteligencia Artificial.
La disertación acerca de la vida y la persona deja ante el terreno de la robótica, enmarcada en el área de la Inteligencia Artificial que pretende imitar los comportamientos más humanos, siendo dicha capacidad, la inteligencia, el rasgo más distintivo que nos caracteriza. (1)
Desde un enfoque de resultado tenemos la definición de Minsky (28) que alude a la construcción de máquinas capaces de hacer cosas que requerirían inteligencia; mientras que desde un enfoque centrado más en el método tenemos la definición Feigenbaum (29) como ciencia encargada del diseño de sistemas de computación inteligente con características propias del comportamiento humano. Desde este último enfoque se ha de destacar las perspectivas de la Inteligencia Artificial planteadas por Newell y Simon orientadas (28): a los mecanismos relacionados con procesos abstractos, métodos y procedimientos orientados al resultado y por último aquella centrada en los mecanismos que median en el funcionamiento de la mente (27,30) ejemplo de ello es la toma de decisiones. (27) (30) (31) (32) (33) (34)
Pero, en definitiva, la Inteligencia Artificial requiere de la representación del conocimiento acerca de los aspectos anteriormente abordados.
Ahondando en el principal objeto de estudio, la robótica del cuidado, encontramos el sistema MISKCBot® desarrollado dentro del Grupo MISKC de la Universidad de Alcalá en la línea de investigación relativa a este campo (27) (29) (30) (35) (36). El uso de la robótica en diferentes disciplinas plantea la problemática del cómo abordarla (37). En este sentido, desde la perspectiva del cuidado se hace necesario partir del estudio del porqué y el cómo del cuidado para aproximarnos a la realidad (38) de éste, en definitiva a la cuidadología como algunos autores defienden (39), de forma que pueda ser representado formalmente e implementado. Por ende, se planteó el objetivo de formular y representar la secuencia del ciclo del cuidado a uno mismo para su implementación en la herramienta robótica MISKCBot®.
MATERIAL Y MÉTODO
El presente estudio emplea metodología deductiva mediante extracción de conocimiento a partir de análisis de fuentes bibliográficas y educción de conocimiento mediante discursatio con expertos. El tiempo de estudio de la presente investigación transcurrió de septiembre de 2016 a junio de 2017. A continuación, se expresa la metodología desarrollada para cada objetivo.
Para la consecución del objetivo 1 “representar el conocimiento sobre el cuidado a uno mismo en base a las limitaciones de acción” se llevó a cabo extracción de conocimiento acerca de los conceptos “vida y cuidado” recurriendo a la revisión de fuentes primarias de diversas disciplinas y una tesis doctoral en relación a las limitaciones de acción de Dorothea Orem (27). Tras ello se realizó fase de formalización del conocimiento mediante educción con expertos a través de un método de reuniones y entrevistas de septiembre de 2016 a marzo de 2017.
Para la consecución del objetivo 2 “establecer un prototipo de la secuencia atendiendo a la dimensión temporal que constituye la representación del conocimiento del cuidado a uno mismo” se llevó a cabo educción del conocimiento mediante utilización de elementos tridimensionales que facilitasen la comprensión y visualización del modelo. Fue llevada a cabo desde febrero de 2017 a abril de 2017.
Para la consecución del objetivo 3 “implementar la secuencia del cuidado propio en MISKCBot” se llevaron a cabo dos fases de abril a junio de 2017. Para la primera se recurrió a extracción de conocimiento mediante búsqueda bibliográfica con los Descriptores en Ciencias de la Salud (DECS) Inteligencia Artificial y Autocuidado correspondientes a los MeSH: “Artificial Intelligence” y “Self Care” en PubMed, Biblioteca Cochrane Plus y Scopus. Además, se revisaron manuales de Computación y Robótica de relevancia para la investigación. En la segunda fase se implementó un sistema robótico, utilizando Arduino, que fue verificado y validado por grupo de expertos.
RESULTADOS
Los resultados obtenidos se expresan a continuación divididos tres apartados.
Resultado 1: Representación del conocimiento sobre el cuidado propio en base a las limitaciones de acción.
Una vez conceptualizados los elementos centrales que conforman el constructo del cuidado, en concreto el cuidado propio, se procedió a la constitución de un modelo de secuencia pasando por una serie de prototipos que planteaban las limitaciones de acción de autocuidado, la problemática de la incorporación del entorno y de la necesidad y, por último, la gestión temporal.
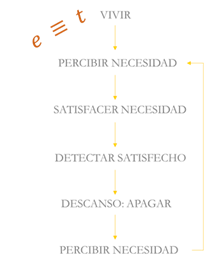
El prototipo de secuencia surgida de lo anteriormente comentado implica la definición de la secuencia que se muestra en la imagen (Figura 1) siguiente poniéndose énfasis en el tiempo que implica un gasto energético lo que supone la necesidad de descansar tras satisfacer la necesidad (Figura 2). Por ello, se recalca el esfuerzo necesario para producir cada segundo de vida.

Tras el establecimiento de este prototipo se procede a la enunciación de un modelo de secuencia lógica de la problemática planteada. En este sentido se toma como referencia la nomenclatura usada por Santamaría García en su tesis doctoral para identificar las limitaciones de acción de autocuidado: “saber” (S), “querer” (Q) y “poder” (P).
Siendo “P”, limitación de acción de la capacidad para la misma, se establece que queda constituida por la relación entre dos estados:
Este conjunto se relaciona con la capacidad o potencia de la persona para ocuparse de la acción a emprender.
Siendo “Q”, limitación de acción de la motivación para la misma, se establece que queda constituida por la relación entre:
De este modo se marca la transición a la satisfacción de la necesidad por medio de la voluntad para ello.
Siendo “S”, limitación de acción del conocimiento para la misma, se establece que queda constituida por las siguientes fases:
Percepción de Estado (PE).
Percepción de Necesidad (PN).
Percepción de Problema (PP).
Toma de Conciencia del Curso de Acción (TCCA).
Toma de Decisión para la Acción (TD).
Inicio de la Acción (IA).
Mantenimiento de la Acción (MA).
Las fases constituyen los pasos necesarios para la toma de conciencia de la necesidad (Figura 3).

Cada fase se relaciona con características de la naturaleza de la persona: capacidad o potencia, voluntad o motivación y conciencia; y que, por ende, justifican el darse del cuidado propio. Una vez definidas las fases se establece la relación entre las mismas (Figura 4). Para ello se define una fase inicial que desencadene la secuencia, “Origen” que forma parte de la secuencia lógica del conocimiento para llevar a cabo la acción.
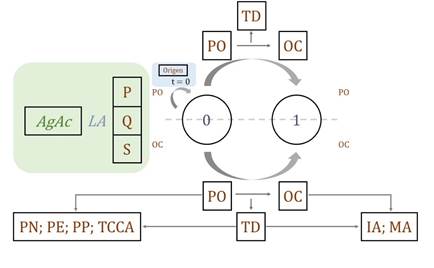
Tal y como puede observarse el conjunto de fases: PE; PN; PP; TCCA; y TD del grupo “S” se corresponden a la fase de preocupación (PO) del grupo “Q”.
Por su parte, las fases IA y MA del grupo “S” se corresponden a la fase de ocupación (O) del grupo “Q” siendo la fase TD el paso de uno a otro grupo, es decir, elemento perteneciente al grupo “S” pero estrechamente ligado al “Q” siendo el campo llave para el paso de la preocupación (PO) a la ocupación (O).
Por otro lado, el paso de preocupación (PO) a (O) siempre se corresponde a un cambio de estado que tiene lugar en el grupo “P”. Este cambio de estado puede darse:
Por tanto, para cada uno de los estados, sea E0 o E1, deben de sucederse las fases “PO” y “O” así como las fases que componen el conocimiento de la acción.
Resultado 2: Establecer un prototipo de la secuencia atendiendo a la dimensión temporal que constituye la representación del conocimiento del cuidado a uno mismo.
Una vez propuesto el modelo de representación y formalización del conocimiento del cuidado propio y, tras la exposición al grupo de expertos descrito en la metodología, se plantea la representación de la secuencia lógica a través de elementos tangibles de modo que la representación se diese en tres dimensiones.
Para ello se recurrió a la utilización de bloques de plástico conectables entre sí. La secuencia de bloques iba aumentando de tamaño según se iban repitiendo las fases, de esta forma se estaba representando el concepto de aprendizaje argumentado en las bases teóricas aludiendo a la maestra Benner.
Se plantea entonces una serie de fases que van de la representación monocapa a la multicapa. Nos centraremos en esta última realizada en base a las limitaciones de acción de autocuidado planteadas por Dorothea Orem como se ha citado anteriormente:
Capa 1: Secuencia de pasos correspondiente a la superación de la limitación de conocimiento del curso de acción; toma de conciencia de la necesidad (Figura 5):

Capa 2: Secuencia de pasos correspondiente a la limitación de motivación para ocuparse de sí mismo; consta de dos pasos, la preocupación y la ocupación; marcando así la transición a la satisfacción de la necesidad por medio de la voluntad para ello (Figura 6):

Capa 3: Secuencia de pasos correspondiente a la limitación de aptitud para hacerse cargo de la ejecución de la acción; capacidad o potencia de la persona para ocuparse de la acción (Figura 7):
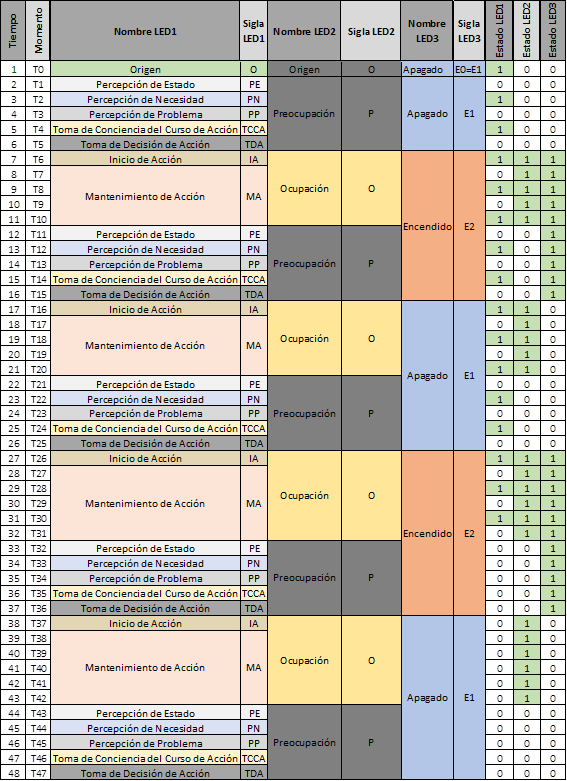
De esta forma la secuenciación del ciclo del cuidado a lo largo del continuum temporal quedaría expresada esquemáticamente de la siguiente forma (Figura 8):

Una vez realizada la formalización mediante la representación gráfica del funcionamiento del sistema se opta por establecer dicha secuenciación del ciclo del cuidado a uno mismo en una hoja de cálculo (Tabla I).
Resultado 3: Implementar la secuencia del Cuidado a Uno Mismo en MISKCBot ® a través del módulo ALMA.
Una vez representado el conocimiento acerca de cómo se produce la secuencia de pasos correspondiente al ciclo del cuidado a uno mismo se dispone a implementar dicha secuencia. Para ello se antoja necesaria una herramienta en la que experimentar con esos resultados de investigación. Se decide implementar el prototipo en el sistema robótico MISKCBot®
La secuencia lógica del cuidado propio se implementa a través de la ejecución del programa en el microcontrolador siendo visible como salida del sistema el conjunto de LEDs utilizados que se han enunciado anteriormente.
A continuación, se describe cada uno de ellos indicando las fases que representan en base al conocimiento formulado en los anteriores resultados (Figura 9, Figura 10, Figura 11):
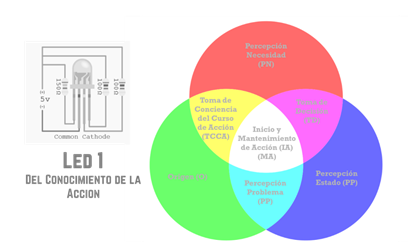


Se ha usado como elemento electrónico programable un LED RGB gracias al cual se pueden obtener múltiples tonalidades a través de la mezcla de tres colores básicos: rojo, verde y azul; la forma de obtener dichas tonalidades atiende al sistema hexadecimal de forma que en función de la codificación obtenemos uno u otro color.
En relación al grupo “Q”, se utilizan dos diodos LED de los colores: rojo y verde para las fases preocupación y ocupación respectivamente.
De esta forma, dado que ambas fases no se dan simultáneamente, cuando uno de los diodos esté iluminado el otro no lo estará. Por otro lado, mientras el diodo LED rojo esté encendido se estarán sucediendo las fases de “Origen” a “Toma de Decisiones”; mientras que el diodo LED verde esté encendido se estarán sucediendo las fases “Inicio y Mantenimiento de Acción”. Por último, en relación al grupo “P” se utiliza un diodo LED de color azul. Mientras éste se encuentre tanto en estado “encendido” como “apagado” se sucederán las fases “preocupación” y “ocupación”.
Una vez establecido cada elemento a utilizar para la representación del ciclo del cuidado propio se procede a implementarlo en el Módulo de Alma mediante la programación utilizando el Software Arduino®.
Por tanto, se está por primera vez ante la implementación del conocimiento en una herramienta robótica, concretamente en un módulo que se conforma como elemento esencial para la constitución de la robótica del cuidado.
Además, la dimensión temporal queda descrita a través de la función planteada para el control de dicha magnitud y que puede ser visualizada a través del Monitor Serial del Entorno de Desarrollo del software Arduino®.
No obstante, se está ante una implementación automatizada, por lo que tras revisión de expertos se decide implementar la detección del estado del LED3.
Para ello se requiere de la utilización de una fotorresistencia o sensor de luz (LDR) a través de cuya programación el sistema fuese capaz de percibir cuál era su estado actual constituyéndose así un paso hacia la no automatización del sistema.
Se requiere de un énfasis en esta fase de la investigación para especificar la diferenciación entre el “YoInterior” y el “YoExterior”.
En este caso se obtuvo “0” en el momento en el que la caja estaba cerrada y el programa se mantenía en “Estado 0”.
DISCUSIÓN
En vista de los resultados obtenidos de la presente investigación se tienen en cuenta los siguientes aspectos:
En relación con la implementación robótica de constructos teóricos del cuidado de la naturaleza de lo expuesto a lo largo de la presente investigación no se han encontrado otros trabajos.
Respecto a la formalización de las primeras fases de adquisición y representación del conocimiento se ha encontrado que investigaciones anteriores abordan esta problemática tal y como se puede observar en las tesis doctorales analizadas relacionadas con el cuidado a otro (30) y con el autocuidado (27) y, concretamente, en las limitaciones de acción de autocuidado (25).
Es por ello, que esta última tesis doctoral ha servido de base conceptual en la fase de representación del conocimiento por lo que constituye un antecedente de relevancia para el estudio.
En el caso de actos de cuidado concretos como pueden ser los constituidos por procedimientos o que abordan ciertas limitaciones de las personas, por ejemplo, de tipo físico, sí que existen en la actualidad diversos ejemplos como los que plantea la sección de robótica de la revista Science en aquellos artículos relacionados con aspectos biomecánicos y fisiológicos humanos. (40)
En relación a la misma revista, en marzo de 2017 fue publicado el artículo “Dynamics of cortical dendritic membrane potential and spikes in freely behaving rats” (41) que incluía un importante hallazgo acerca de cómo el cerebro procesa la información para aprender, percibir y formar y almacenar recuerdos. Lo planteado es que hasta ahora las dendritas se consideraban pasivas en el funcionamiento neuronal pero los resultados del estudio muestran lo contrario y que en ellas se toman las decisiones utilizando cálculo analógico. Esto último adquiere una relevancia fundamental en el campo de la robótica dado que actualmente la inteligencia artificial intenta imitar la actividad cerebral humana a través de cálculo analógico y binario siendo este último, según los resultados, no válido para la problemática del desarrollo de robots que asemejan la inteligencia humana.
Por otro lado, en el campo de la terapéutica, existen robots orientados al cuidado de personas con problemas de salud como “Aisoy” mientras que el desarrollo de robots humanoides que asemejan la estructura física y funcional humana está en potencia con ejemplos como “Nao”.
No obstante, son computadoras que llevan implementados sistemas de inteligencia artificial las que se acercan a la simulación del comportamiento humano de manera más fiel atendiendo a conceptos expresados a lo largo del presente estudio. Coincide esta línea con lo localizado tras la búsqueda bibliográfica pormenorizada llevada a cabo en relación a los términos “autocuidado” e “inteligencia artificial”.
Para cerrar este apartado se enfatiza en las semejanzas de la secuenciación lógica de las fases del cuidado propio propuestas en esta investigación con el “Modelo Transteórico del Cambio” de Prochaska y Diclemente utilizado en el campo de las Ciencias de la Salud con recurrencia.
CONCLUSIONES
El enfoque dado en la presente investigación permite la modelización de diversas situaciones de cuidado desde un punto de vista pormenorizado estableciendo así una secuencia lógica que viaja de la preocupación por una necesidad, a la satisfacción de la misma a través de la ocupación e inmediatamente a la preocupación por la siguiente necesidad implícita en la primera. Esta secuencia lógica se desarrolla, por ende, en la dimensión temporal.
Y es que la vida que, a fin de cuentas, es cuidado y se desarrolla en dicha dimensión siendo el vivir de cada cual, recurriendo al pensamiento orteguiano. Y, en este vivir, el tiempo avanza inevitablemente por lo que es la perspectiva respecto al mismo el que difiere constituyéndose una problemática cognitiva que nos relaciona con el mundo. Así, utilizando el símil del metrónomo al que recurre el Dr. Santamaría en sus conferencias (36), la gestión temporal se plantea como manifestación de los ritmos de una etapa vital o una cultura concreta. En el primero de los casos se debe tener en cuenta los procesos de aprendizaje a los que la maestra Patricia Benner ya prestaba especial atención en el campo del cuidado.
No obstante, y dado que el cuidado propio, sirviéndonos de la RAE para esta argumentación, es exclusivo, característico, referente a una persona, necesario o inseparable de la esencia y la naturaleza de las cosas; se plantea la existencia del metrónomo propio característico de cada persona, de la etapa vital en la que se enmarque y de la sociedad en la que habita.
Dicha secuencia lógica que ha podido ser implementada robóticamente requiere del planteamiento de una serie de reglas. La realidad actual se sitúa ante un paradigma que posiciona a los robots como elementos capaces de desarrollar capacidades o competencias y satisfacer necesidades simulando así el cuidado tal y como lo entendemos.
Por lo tanto, debieran establecerse una serie de reglas que impidan el desarrollo de la capacidad de los robots por encima del potencial humano, pero tampoco debieran disminuir sus necesidades requiriendo de un límite; constituyéndose las leyes de la robótica del cuidado.
Para la argumentación de las mismas se requiere de un marco de comprensión del cuidado que devenga del desarrollo de investigaciones en relación a esta problemática tal y como se sucede en el Grupo Management about Information and Standard Knowledge of Care (MISKC) de la Universidad de Alcalá. (36)

