










 Servicios personalizados
Servicios personalizados
 texto en
texto en  Inglés (pdf)
Inglés (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Citado por Google
Citado por Google  Similares en
SciELO
Similares en
SciELO  Similares en Google
Similares en Google 
 Permalink
PermalinkINTRODUCCIÓN
Desde su descripción a finales del siglo XIX por Theodor Kocher, la cirugía de la glándula tiroides no había experimentado cambios técnicos significativos hasta que a finales del siglo XX empezaron a plantearse los abordajes de mínima invasión para la paratiroidectomía y la tiroidectomía. En el año 1995, Michael Gagner realizó la primera paratiroidectomía endoscópica [1] y en el 1996 Husher la primera lobectomía tiroidea endoscópica [2]. Durante unos años se exploraron las opciones para aplicar técnicas endoscópicas a la cirugía tiroidea y paratiroidea, con la filosofía de la mínima incisión y la mínima disección. Los problemas a resolver eran diversos. El primero y más evidente era que en el cuello no existe una cavidad anatómica, como por ejemplo la cavidad peritoneal, que pueda insuflarse con gas para mantener el campo quirúrgico. En el cuello la disección se realiza entre planos fasciales; para mantener el espacio operatorio sin que se colapsara, debían utilizarse separadores (por ejemplo, agujas de Kirshner percutáneas [3]) o insuflar CO2 si la técnica permitía un espacio estanco. La inyección de gas en el plano subplatismático produjo extensos y aparatosos enfisemas en las primeras experiencias (aunque, con la reducción de la presión este problema es anecdótico en la actualidad). Otro problema era la elección de los puntos de acceso, que fueron alejándose progresivamente del área cervical, pasando del propio cuello al área infraclavicular y posteriormente al tórax.
De estas experiencias iniciales la única que perdura en la actualidad es la tiroidectomía mínimamente invasiva videoasistida de Miccoli (MIVAT, Minimally Invasive VideoAssisted Thyroidectomy), que encontró un compromiso entre la minimización de la incisión y el apoyo endoscópico [4]. Sin embargo, esta técnica solo es utilizada por algunos grupos de cirujanos en diversas partes del globo y tiene el inconveniente de que sigue existiendo una cicatriz cervical. Por tanto, si uno de los objetivos de este enfoque es que no queden señales visibles de la cirugía, el MIVAT no es una buena opción. Máxime cuando en realidad la mayor o menor visibilidad de la cicatriz no depende tanto de su tamaño como de su aspecto final, el cual a menudo está condicionado por factores poco controlables.
En el año 2000, Yoshifumi Ikeda describió la tiroidectomía transaxilar a inauguró la era moderna del acceso remoto al cuello [5]. En el relativamente breve espacio de tiempo transcurrido desde entonces, se han ido probando diversas opciones respecto al número de puntos de acceso y su localización en la región pectoral (obviando ya por completo las cicatrices en áreas visibles en el cuello), así como a la forma de mantener el campo quirúrgico. Aunque en algún momento se han utilizado trócares en áreas visibles de la pared torácica anterior (por ejemplo, subxifoideos), con la introducción de la incisión periareolar (Ohgami, 2000 [6]) las combinaciones del acceso axilar y periareolar, todos ellos ocultos, han sido suficientes. Puede realizarse un acceso puramente lateral (axilar), lateromedial (axilar y pectoral, como el ABBA, Axilo Bilateral-Breast Approach [7]), o axilopectoral bilateral (BABA, Bilateral Axillo-Breast Approach [8]).
En 2001, Woong Youn Chung introdujo el acceso axilar sin gas y diseñó el correspondiente separador (retractor de Chung) [9]. En 2007 el mismo autor introdujo la instrumentación robótica para este abordaje [10]. Este ha sido uno de los abordajes más utilizados hasta la fecha para la tiroidectomía de acceso remoto.
Entre el año 2010 (Willhelm y Metzig, a través del suelo de la boca [11]) y el 2011 (Richmon y cols., con instrumentación robótica [12]), se describió la tiroidectomía transoral. A partir de una serie de modificaciones con la opción por la vía transvestibular y la nueva distribución de las incisiones, según la describe Anuwong [13], se consolida como una técnica emergente (TOETVA, TransOral Endoscopic Thyroidectomy – Vestibular Approach). Es probablemente el abordaje en más rápida expansión en su versión endoscópica.
En el año 2011, David Terris publicó la técnica de la tiroidectomía robótica por abordaje retroauricular [14]. En realidad, la técnica es una expansión del abordaje de ritidectomía (lifting facial o facelift) que el mismo autor describió en 1994 para la cirugía de la glándula parótida [15]. Esta técnica ha sido muy bien acogida en diversos servicios de otorrinolaringología para la tiroidectomía y la disección cervical.
Los resultados y la experiencia han consolidado cuatro técnicas de acceso remoto al cuello como resultado de este proceso de los últimos años. Aplicadas a la cirugía de la glándula tiroides estas técnicas son la tiroidectomía axilar o transaxilar (normalmente sin gas, e instrumentada con robótica o con material convencional de endoscopia), la tiroidectomía por abordaje axilopectoral bilateral, BABA (que es una técnica con gas, más frecuentemente con instrumentación robótica), la tiroidectomía retroauricular o por facelift (sin gas y normalmente robótica) y la tiroidectomía transoral / transvestibular (más frecuentemente con gas y laparoscópica), aunque algunos grupos siguen trabajando en su versión robótica (TORT, TransOral Robotic Thyroidectomy).
Cada una tiene sus ventajas y sus limitaciones. En el presente artículo describiremos tanto las técnicas como las indicaciones y limitaciones de cada una de ellas.
TÉCNICAS DE ACCESO REMOTO A LA GLÁNDULA TIROIDES
La cirugía tiroidea de acceso remoto tiene la particularidad de que transforma la tiroidectomía abierta convencional en un procedimiento endoscópico (instrumentado con material convencional de endoscopia o con robótica). Sin embargo, el objetivo de la cirugía es el mismo (la extirpación parcial o total de la glándula tiroides) e incluso desde el punto de vista técnico los gestos quirúrgicos son muy similares. La diferencia más obvia es que en el acceso remoto no hay heridas visibles en la región cervical, aunque la introducción de la tecnología ofrece otros beneficios potenciales.
Para entender las distintas opciones de abordaje debemos considerar las tres alternativas que van a condicionar nuestra forma de trabajar.
La primera decisión es si vamos a utilizar un acceso percutáneo (o mucoso en el caso del transvestibular) a través de una incisión o a través de la punción directa de los trócares. En este segundo caso la cicatriz resultante será sólo la de la punción del trócar, virtualmente invisible, y obtendremos una cavidad estanca que podremos insuflar con gas (esto es así en BABA y TOETVA/TORT). Si hacemos una incisión, la función de los trócares será simplemente la de estabilizar los instrumentos (en caso de instrumentación robótica) y podremos utilizar más o menos instrumentos simultáneos dependiendo del tamaño del campo de trabajo (normalmente cuatro brazos robóticos en el abordaje axilar, pero solo tres en el retroauricular). Esta incisión dejará lógicamente una cicatriz, que estará diseñada para quedar escondida (tras el pliegue axilar o en la región retroauricular), pero que será normalmente identificable.
La segunda decisión es la distribución y el número de los puertos de acceso (Figura 1). Anatómicamente respecto a la región tiroidea, podemos plantear un abordaje superior o inferior, lateral o medial. El transvestibular y el retroauricular son abordajes superiores (el primero medial y el segundo lateral), y el BABA y el axilar, inferiores (el primero medial y el segundo lateral).

Figura 1. Técnicas de acceso remoto a la glándula tiroides. La flecha azul corresponde al endoscopio, y las verdes a los instrumentos. A: Abordaje axilar o transaxilar. Es un abordaje lateral e inferior que puede realizarse con gás o sin gas, y con instrumentación robótica (con 4 brazos) o no robótica. B: Abordaje axilopectoral bilateral. Es un abordaje medial e inferior con gas, robótico o no robótico. C: Abordaje retroauricular. Es un abordaje superior y lateral, sin gas, con tres brazos, robótico. D: Abordaje transoral / transvestibular. Es un abordaje superior y medial, normalmente con gas, robótico (con 3 brazos) o no robótico.
Por último, deberemos decidir si vamos a instrumentar con robótica o no. El abordaje axilar y el BABA se instrumentaron durante años con material convencional hasta la introducción de la robótica. El retroauricular se describió directamente como robótico y el transvestibular se realiza más frecuentemente con material convencional.
Las opciones por tanto son diversas y la elección de una o otra técnica depende de la experiencia, la indicación concreta y otros factores. La tiroidectomía de acceso remoto es técnicamente difícil. Normalmente se considera que la instrumentación robotizada acorta la curva de aprendizaje y hace el procedimiento técnicamente más sencillo, aunque las circunstancias concretas suelen ser más complejas porque dependen en gran medida de la experiencia quirúrgica previa.
Veamos los detalles de cada una de las técnicas.
Tiroidectomía transaxilar
El abordaje transaxilar puede realizarse a través de la punción de trócares y la insuflación con gas, aunque la forma más habitual de aplicarlo es a través de una incisión tras el pliegue axilar anterior, a partir de la cual se levanta un colgajo subcutáneo en la región pectoral hasta acceder al cuello. Este abordaje sin gas exige el uso de un separador para mantener el campo. A través de este abordaje pueden introducirse los cuatro brazos robóticos, además del instrumental auxiliar que sea necesario en cada paso quirúrgico, o la instrumentación convencional de laparoscopia sin necesidad de trócares.
La tiroidectomía transaxilar en una técnica muy reglada en la que existe una extensa experiencia clínica. El abordaje axilar permite realizar la tiroidectomía cumpliendo los estándares de seguridad más exigentes, incluida la neuromonitorización [16]. Su otra gran ventaja es que en realidad es un abordaje abierto videoasistido (en cierto sentido similar al MIVAT), lo cual puede facilitar el manejo de ciertas complicaciones (por ejemplo, el sangrado) y resultar a priori más confortable para algunos cirujanos. Evita también una complicación muy rara, pero potencialmente grave, asociada a los abordajes con gas, que es la embolia gaseosa, que puede ocurrir por ejemplo si se abre accidentalmente una vena yugular en abordajes cerrados con gas a presión [17]. Aunque en las series iniciales se comunicó morbilidad sobre el hombro asociada a la posición de hiperextensión, estos problemas se han eliminado ajustando la posición del paciente para la intervención [18].
Este abordaje tiene dos problemas fundamentales. El primero que es que el resultado cosmético de la incisión suele ser malo, y aunque la cicatriz quede oculta tras el pliegue axilar anterior, esto puede ser aceptable en determinadas culturas (ej. asiáticas), pero no tanto en otras (ej. mediterráneas). Por otro lado, el abordaje exige un amplio despegamiento cutáneo que en realidad lo aleja del concepto de mínima invasión.
Quirúrgicamente el abordaje a la glándula tiroides es lateral e inferior, lo cual conlleva algunas diferencias técnicas con la tiroidectomía convencional. El plano de despegamiento del colgajo es subcutáneo en el tórax y subplastismático en el cuello, con lo cual quedan expuestas las referencias anatómicas habituales: músculos largos prelaríngeos y esternocleidomastoideo (ECM). La primera diferencia importante es que la separación de los músculos no se realiza en línea media. De acuerdo con el vector de acceso, se realiza una separación de los vientres clavicular y esternal del ECM, y este último se separa superiormente junto con los prelaríngeos (omohioideo, esternotiroideo y esternohioideo) de ambos lados. La línea alba media se mantiene por tanto íntegra. En este punto queda ya expuesta la glándula tiroides y es el momento de estabilizar el retractor e introducir los brazos robóticos (Figura 2).

Figura 2. Abordaje transaxilar (preparación en cadáver). A. En condiciones clínicas la incisión debe trazarse con el paciente erguido y el brazo en reposo para asegurar que queda escondida tras el pliegue axilar anterior. Una vez seccionada la piel y el tejido subcutáneo se identifica con facilidad el músculo pectoral y se sigue su cara superior hacia la región tiroidea. B. Tras levantar y estabilizar el colgajo cutáneo se introducen los brazos robóticos. Se utiliza el endoscopio de 30º. La incisión permite la introducción del cuarto brazo, aunque debe prestarse atención a su colocación para evitar colisiones.
Lo habitual es indicar este abordaje para la hemitiroidectomía, y por tanto el lado de acceso es el correspondiente al lóbulo a extirpar. Puede realizarse una tiroidectomía total por un abordaje unilateral, pero la disección lateral del lóbulo contralateral (y por tanto la disección de las glándulas paratiroides y el nervio laríngeo recurrente) es técnicamente difícil. Existe la opción de hacer un abordaje axilar bilateral, o éste puede plantearse de forma diferida si el análisis anatomopatológico de la pieza indica la totalización. Sin embargo, podría considerarse que este planteamiento aporta una morbilidad excesiva, particularmente cuando hay alternativas mejores. Este problema es compartido por los abordajes laterales. En el caso del retroauricular, que tiene un corredor de trabajo más estrecho, ni siquiera se contempla la opción de la lobectomía contralateral.
Los objetivos quirúrgicos son los mismos, independientemente del abordaje. La extirpación efectiva y segura del lóbulo tiroideo, preservando las glándulas paratiroides superior e inferior, y los nervios laríngeos recurrente y superior. La técnica de la tiroidectomía transaxilar fue originariamente descrita con instrumentación convencional de cirugía endoscópica, con la que se señalaban algunas limitaciones técnicas que limitaban por ejemplo la realización de la lobectomía contralateral [19]. Posteriormente se describió la técnica con instrumentación robotizada, a la vez que se introdujeron mejoras adicionales, como los separadores específicos [20]. La instrumentación se realiza con un instrumento de disección (ej. disector de Maryland), un instrumento de corte (normalmente el harmónico) y un tercer brazo que actúa como separador (ej. un fórceps fenestrado). La secuencia quirúrgica es la misma que en la tiroidectomía convencional: ligadura del pedículo laríngeo superior, separación medial del lóbulo con identificación y preservación de las glándulas paratiroides superior e inferior y el nervio recurrente laríngeo, completando la lobectomía.
Existen series extensas que avalan la seguridad quirúrgica y oncológica de la tiroidectomía transaxilar robótica [21].
Tiroidectomía por abordaje axilopectoral bilateral
El abordaje axilopectoral bilateral (BABA) es un abordaje medial e inferior, con gas, que proporciona una perspectiva quirúrgica muy similar a la de la tiroidectomía convencional. A diferencia del abordaje axilar, la colocación del paciente se realiza sin extensión del hombro, en una posición más natural. Se precisa cierta extensión cervical, como en la cirugía convencional de tiroides, y una pequeña rotación posterior de los hombros. Una ventaja adicional del BABA, y en general de los accesos con gas, es que no precisan de separadores o de retractores para mantener el campo quirúrgico, ya que es la propia insuflación de gas la que realiza esta función.
La tiroidectomía por BABA es una técnica reglada, que con pequeñas modificaciones se realiza de forma similar en todos los centros [22]. Al igual que el abordaje axilar, inicialmente fue descrito con material convencional de endoscopia [23]. Sin embargo, la instrumentación robótica aporta la ventaja de una imagen tridimensional de alta definición que facilita la identificación de las estructuras, y sobre todo una capacidad de manipulación con los instrumentos que compensa las limitaciones del trabajo en un campo confinado.
Se rotulan en el campo quirúrgico las referencias anatómicas, los puntos de entrada y las trayectorias del endoscopio y los instrumentos (Figura 3). Se inyecta el área subcutánea a despegar con suero salino con o sin vasoconstrictor. A continuación, se realizan las incisiones cutáneas y el despegamiento romo de los túneles siguiendo las trayectorias correspondientes. El primer túnel será el del endoscopio, que se introducirá por el puerto pectoral ipsilateral a la lobectomía. Una vez introducido el primer trócar se realizará la insuflación de CO2, que será a baja presión (8 mm Hg con flujo máximo de 20 L/mn). Se utilizará en endoscopio de 30º orientado hacia abajo. Bajo control endoscópico se completará el levantamiento del colgajo hasta obtener un espacio de trabajo adecuado (Figura 4). Respecto a la instrumentación, será la misma que para el transaxilar, utilizando los cuatro brazos con fines similares, aunque con mucho menor riesgo de colisiones gracias a las trayectorias de acceso mucho más favorables. Alternativamente al harmónico, podemos utilizar como instrumento de corte en gancho monopolar, que puede agilizar el trabajo en determinados pasos, además de actuar como sonda para el estimulador del neuromonitor [24]. Una de las normas básicas es que la cirugía sea lo más exangüe posible, ya que el control de la hemorragia se dificulta sustancialmente en un campo confinado y es uno de los principales riesgos de conversión.
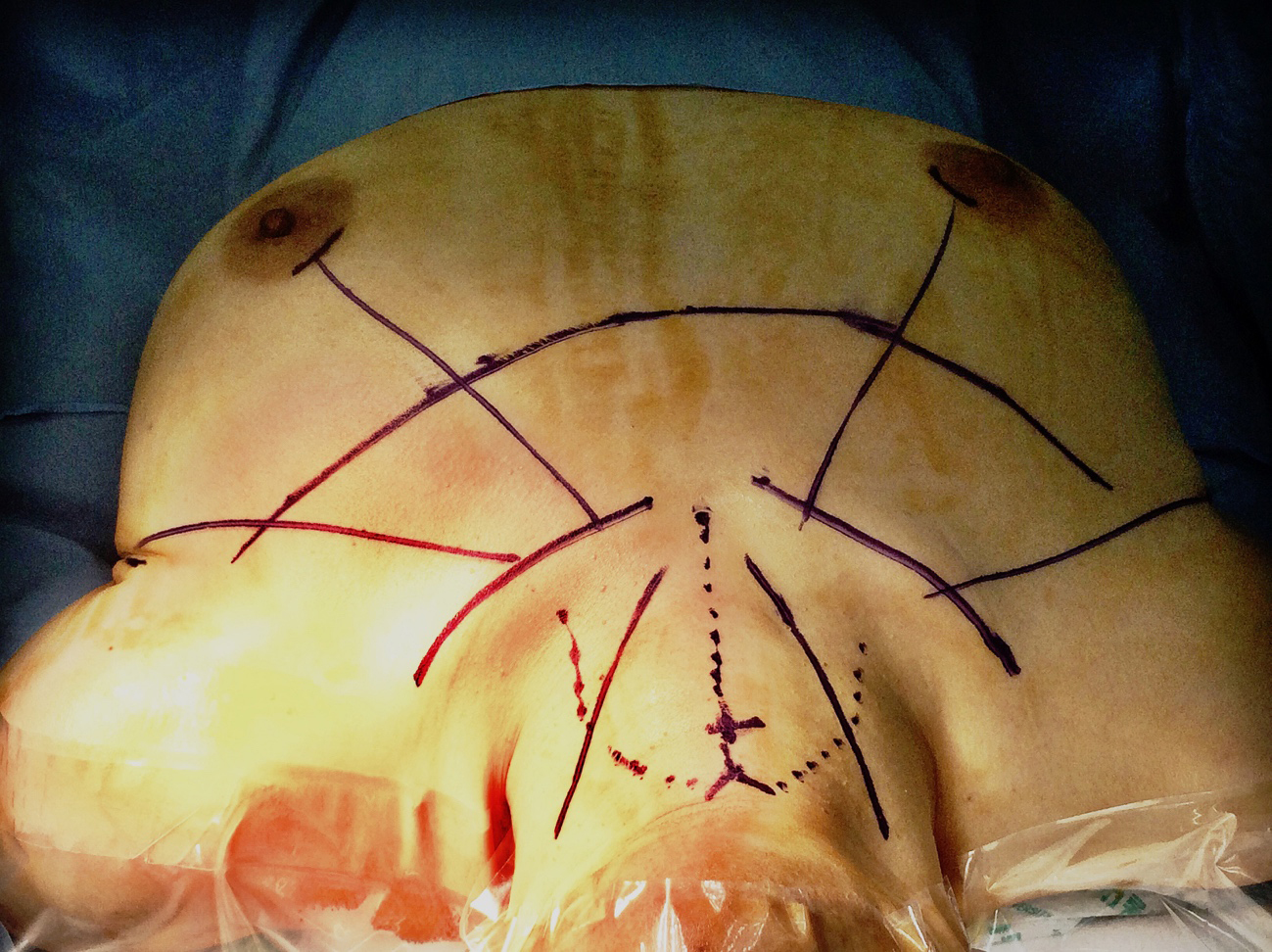
Figura 3. Referencias anatómicas para el BABA. Visión desde la cabecera del paciente. Es adecuado rotularlas en la zona cervicopectoral una vez pañeado el campo. En el cuello se marca primero la escotadura del cartílago tiroides ("V") y la línea media del cartílago cricoides ("+"), además del borde anterior del músculo esternocleidomastoideo bilateralmente y el borde superior de las clavículas. Marcamos la línea media desde la escotadura hasta el yugulum esternal, y el área aproximada del colgajo cervical que necesitamos levantar para poder trabajar. Los puntos de acceso son sendas incisiones arqueadas en el límite superomedial de ambas areolas, y dos incisiones lineales en sendos pliegues cutáneos en ambas axilas. La trayectoria de los instrumentos va desde los puntos de acceso en dirección a la línea media del cricoides. Necesitaremos también un cierto despegamiento cutáneo por debajo de las clavículas para que los brazos de instrumentación tengan una libertad de movimiento suficiente.

Figura 4. Campo quirúrgico para la tiroidectomía por BABA (desde el visor de la consola del cirujano del da Vinci Si). Se ha marcado la línea media y el borde anterior del ECM derecho. Nótese que la perspectiva es muy similar a la que tenemos en una tiroidectomía convencional y que la insuflación con gas proporciona un campo de trabajo muy cómodo.
Debido al tipo de instrumentación, la técnica de la tiroidectomía difiere en algunos puntos de la técnica convencional abierta. Una vez separada la musculatura prelaríngea en línea media se secciona el istmo de la glándula tiroides para facilitar la tracción medial. La modificación más importante es que la disección de la glándula se realiza de inferior a superior, seccionando en último lugar el pedículo superior. Lateralmente debe identificarse y preservarse el nervio laríngeo recurrente y las glándulas paratiroides superior e inferior. Igualmente, antes de seccionar el pedículo superior, debe identificarse el nervio laríngeo superior. Se repite el mismo procedimiento en el otro lado en caso de realizarse una tiroidectomía total. Si existe indicación de disección del compartimento ganglionar central, ésta puede realizarse con el mismo campo.
Existen igualmente series muy extensas que avalan la seguridad quirúrgica y oncológica de la tiroidectomía por BABA [25]. La tecnología aporta recursos que pueden potencialmente mejorar los resultados funcionales de la tiroidectomía, independientemente de la mejor visualización y la disección más cuidadosa, como la identificación y confirmación intraoperatoria de la viabilidad de las glándulas paratiroides con verde de indocianina [26].
Por otro lado, aunque técnicamente difícil, el BABA es un acceso excelente para la disección ganglionar lateral del cuello [27], incluso si ésta ha de ser bilateral [28].
Tiroidectomía por abordaje retroauricular
La incisión de ritidectomía está diseñada para trabajar en la cara y la región cervical a través de unos trazos camuflados en la región pre y retroauricular. Permite trabajar de forma directa en la región parotídea y el área laterocervical alta. Existe una extensa experiencia en la cirugía sobre la glándula parótida a través de esta incisión, que actualmente es un estándar [29] (Figura 5). La prolongación inferior y anterior del despegamiento del colgajo cutáneo permite exponer todo el cuello, incluida la región tiroidea. Se precisa un separador adecuado para mantener elevado el colgajo y una técnica videoasistida para trabajar en las áreas más distales.
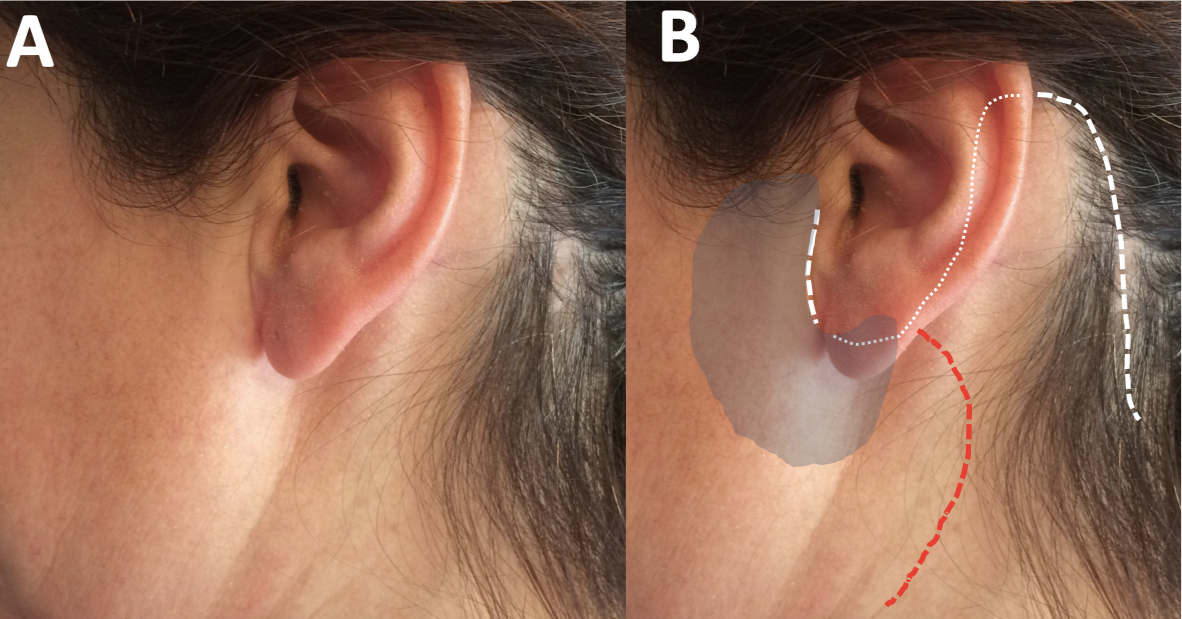
Figura 5. Incisión de facelift. A. Resultado cosmético de una parotidectomía. B. A diferencia de la incisión de Blair que tiene un trazo cervical (línea roja), la incisión de ritidectomía o lifting facial (línea blanca) tiene todos sus trazos camuflados. Proporciona acceso tanto a la región parotídea (sombreada), como a la porción superior del área laterocervical de forma directa. Para el abordaje robótico a la glándula tiroides no se requiere el trazo preauricular.
La tiroidectomía retroauricular comparte con el abordaje axilar que ambos son abordajes abiertos y laterales; este último inferior, y el primero superior. El abordaje retroauricular requiere un menor despegamiento de superficie cutánea, pero proporciona un corredor de trabajo más estrecho, que limita, por ejemplo, la lobectomía contralateral. Sin embargo, si debe realizarse sobre cirugía del cuello lateral, parte del procedimiento puede hacerse con una técnica abierta convencional, introduciendo la instrumentación robótica solo para los territorios más distales.
La técnica de la lobectomía tiroidea por abordaje de facelift es una técnica reglada que se describió desde el principio con instrumentación robótica [30]. El paciente se coloca en decúbito supino, sin extensión cervical, con el cuello lateralizado 30º hacia el lado contrario. Se utiliza una incisión de facelift modificada, sin el trazo preauricular. La incisión y el despegamiento inicial del colgajo se realizan de manera estándar. En las áreas más superiores debe tenerse precaución con no lesionar el nervio auricular mayor. Posteriormente, el músculo ECM sirve de referencia para continuar la disección subplastismática del colgajo inferior y anteriormente con la ayuda de separadores progresivamente más largos y de puntas de monopolar largas. A continuación, encontraremos el músculo omohioideo y más medialmente el esternohioideo y el esternotiroideo. Separando estos últimos de lateral a medial expondremos el polo superior de la glándula tiroides. Se mantienen en esta posición con un retractor y a continuación se introducen los brazos robóticos. Se utiliza el endoscopio de 30º hacia abajo y dos instrumentos, un disector (Maryland) y un instrumento de corte (harmónico).
Dado que el acceso a la glándula tiroides es superior, el primer paso quirúrgico será la ligadura del polo superior que posteriormente se rechaza inferior y medialmente para identificar en el área lateral primero la glándula paratiroides superior y el nervio laríngeo recurrente, y posteriormente la paratiroides inferior. Identificadas estas estructuras, se secciona el tejido medial a las mismas, incluido el ligamento de Berry, y finalmente la vena tiroidea inferior. Tras comprobar la hemostasia se sutura la incisión cutánea; normalmente no se utilizan drenajes.
El abordaje retroauricular ha tenido particular aceptación en los departamentos de otorrinolaringología, posiblemente porque todo el trabajo se realiza en un territorio quirúrgico muy familiar y no precisa el uso de CO2. Esta aceptación incluye de forma más generalizada que para otros abordajes, centros fuera del área de Asia-Pacífico [31]. Además de para la tiroidectomía, el abordaje retroauricular es adecuado para otras intervenciones sobre el cuello lateral como la submaxilectomía [32] o la disección ganglionar [33]. El abordaje retroauricular está teniendo en occidente un desarrollo para cirugía cervical distinta de la tiroidectomía que no habían tenido otros abordajes [34].
Tiroidectomía transvestibular
Como hemos mencionado anteriormente, la tiroidectomía transvestibular en probablemente la técnica en más rápida expansión. Aunque se ha descrito con distintos tipos de instrumentación, incluido el sistema robótico más reciente de puerto único [35], probablemente su aplicación más habitual es con instrumentación convencional de cirugía laparoscópica. Su gran ventaja es su factibilidad con costes ajustados (por la instrumentación convencional), además de la obvia ausencia absoluta de cicatrices visibles. Sus limitaciones son, por un lado, la dificultad técnica y, por otro, un corredor de trabajo restringido que limita los procedimientos a la tiroidectomía y la disección del compartimento central.
Aunque puede realizarse como procedimiento abierto con la ayuda de separadores, lo habitual es que la técnica se realice con gas. Puede tener limitaciones de acceso dependiendo de la configuración anatómica de cada paciente. Las complicaciones típicas en los casos iniciales se relacionaron con la lesión de los nervios mentonianos. La modificación de las incisiones ha resuelto este problema.
Actualmente la tiroidectomía transvestibular con instrumentación de cirugía endoscópica (TOETVA) es una técnica reglada [36]. El paciente se coloca en decúbito supino con una discreta extensión cervical y el campo se pañéa de la forma habitual, dejando al descubierto la boca, que se lava con una solución antiséptica. Las incisiones se realizan en la mucosa del labio inferior. Se precisa una incisión medial para la cámara, que tendrá un trazo horizontal por delante del frenillo labial, y dos laterales para los instrumentos, de trazo vertical (Figura 6). La incisión central se progresa con cauterio monopolar a través del músculo mental hasta la punta del mentón. A continuación, se inyecta a través de la incisión una solución salina para hacer hidrodisección del área cervical. Posteriormente con un disector (ej. Kelly) se diseca el plano entre al músculo platisma y los músculos prelaríngeos. Una vez definido este plano, se amplía la disección con un tunelizador y se inserta el trócar de la cámara, a través del cual se insufla el CO2 con una presión de 6 mmHg a bajo flujo (15 L/mn). El campo de trabajo es verticalmente entre el cartílago tiroides y el yugulum esternal, y lateralmente hasta ambos ECM. La instrumentación se realiza con material de cirugía laparoscópica: gancho monopolar, disectores (Maryland) y harmónico, y la visualización con un endoscopio de 30º (Figura 7). Los múculos prelaríngeos se separan en linea media y se disecan del lóbulo tiroideo. Se diseca primero el lóbulo piramidal de la glándula tiroides y se secciona el istmo. Posteriormente se identifica el espacio avascular de Joll para separar el polo superior e identificar el pedículo superior, que se secciona con el harmónico. A continuación, se separa medialmente el lóbulo tiroideo para exponer el surco traqueoesofágico e identificar el nervio recurrente, que se preservará junto con ambas glándulas paratiroides (superior e inferior). Finalmente se secciona el ligamento de Berry y se extrae la pieza en una endobolsa. Si se va a realizar una tiroidectomía total, se repite el procedimiento en el otro lado. Se aproxima la musculatura prelaríngea y se cierra las incisiones mucosas con una sutura reabsorbible. El paciente deberá llevar un apósito compresivo las primeras 24h (análogo al utilizado para el lifting).

Figura 6. Incisiones para el TOETVA en la mucosa del labio inferior. Incisión medial de 10 mm, horizontal, por delante del frenillo labial (ya realizada) y dos incisiones laterales de 5mm, verticales, deplazadas superior y lateralmente para evitar la lesión de las ramas de los nervios mentonianos que emergen de la mandíbula a nivel de los caninos.

Figura 7. Campo quirúrgico del abordaje transvestibular a la glándula tiroides. La flecha señala en dirección inferior (yugulum esternal). Se han marcado los bordes mediales de los ECM (líneas de rayas) y de la musculatura prelaríngea, ya separada en la línea media (líneas de puntos). El cirujano está instrumentado con un disector de Maryland en su mano izquierda y un harmónico en la derecha, y está seccionando el istmo de la glándula tiroides. En la parte superior de la imagen se aprecia la cara interna del colgajo cutáneo, mantenido por el gas.
Aunque una de las preocupaciones iniciales respecto a este abordaje era el riesgo de infección, dado que el acceso se realiza a través de un área contaminada (el vestíbulo de la boca), el hecho es que no existen comunicaciones de infecciones postoperatorias en las series publicadas, ya muy numerosas. No obstante, se utiliza cobertura antibiótica perioperatoria.
La tiroidectomía transvestibular es segura y eficaz. Desde su desarrollo inicial se planteó estandarizarla y existen grupos internacionales de expertos dedicados a ello [37].
Elección del abordaje
Todas las técnicas presentadas han demostrado ser seguras y eficaces y con todas ellas existe experiencia suficiente. La elección de una u otra ha estado históricamente muy condicionada por el lugar y el centro donde se han desarrollado, y probablemente también por un sesgo de formación del cirujano según su proveniencia sea la otorrinolaringología – cirugía de cabeza y cuello, o la cirugía general / cirugía endocrina. A menudo resulta difícil hacer comparaciones entre ellas. Sin embargo, sí podemos hacer algunas generalizaciones (Tabla 1).
Tabla 1. Características diferenciales de las alternativas de acceso remoto para la cirugía de la glándula tiroides (adaptado a partir de una sugerencia del profesor Kyung Tae). Valoración cuantitativa orientativa (más / menos de 1 a 4 «+»; «-» si no existe posibilidad. En rojo la mejor opción en cada aspecto).
| Abordaje | Axilar | Axilopectoral Bilateral | Retroauricular (facelift) | Transoral / transvestibular |
| Característica | ||||
| Invasividad | ++++ | +++ | +++ | ++ |
| Espacio de trabajo | +++ | ++++ | +++ | ++ |
| Tiroidectomía total | + / - | ++++ | - | ++++ |
| Disección central | +++ | +++ | +++ | +++ |
| Disección lateral | ++++ | ++++ | ++++ | - |
| Dolor postoperatorio | ++ | ++ | ++ | ++ |
| Resultado cosmético | ++ | ++++ | +++ | ++++ |
| Complicaciones | + | + | + | + |
Las técnicas sin gas precisan en general un despegamiento más amplio de tejidos que puede potencialmente generar más morbilidad. De ellas, la tiroidectomía axilar es la más antigua y ha sido uno de los objetos de crítica de la tiroidectomía robótica [38]. Estas críticas tenían que ver con la propia justificación del abordaje y con los costes asociados a la instrumentación robótica. La experiencia acumulada en años posteriores ha servido para superar esta forma de plantear el debate, aunque efectivamente es probable que el abordaje axilar se vaya abandonando y quede con un valor histórico. El retroauricular no es probablemente el mejor abordaje para la tiroidectomía. Sin embargo, como hemos comentado, tiene indicaciones potenciales en multitud de patologías quirúrgicas del cuello lateral.
De los abordajes mediales con gas, ya hemos señalado las ventajas del transvestibular no robótico (TOETVA) y los motivos de su expansión actual. Sus limitaciones se relacionan por un lado con la curva de aprendizaje y por otro con las indicaciones, no solo por las variables relacionadas de la propia enfermedad tiroidea, sino por su limitación a la patología del compartimento central del cuello. El BABA robótico es también un abordaje técnicamente difícil, pero que no tiene algunas de las limitaciones del TOETVA.
En el año 2016 la American Thyroid Asociation (ATA) publicó un documento de posicionamiento sobre la tiroidectomía de acceso remoto [39]. Aunque señalaba una serie de condicionantes y restricciones, en la práctica abría una puerta. El documento de la ATA se redactó con series mucho más limitadas de las que disponemos ahora y ni siquiera consideraba el abordaje transvestibular.
En el camino recorrido hasta ahora se ha ido progresando en las indicaciones y se han ido superando limitaciones: en el tamaño máximo de los nódulos o de la propia glándula tiroides, en el abordaje de patología benigna o maligna, en la indicación o no en la tiroidectomía por enfermedad de Graves, etc. Probablemente es razonable que al menos parte de este camino se recorra de nuevo en los servicios en los que se vayan introduciendo las técnicas [40].
El debate que permanece vigente es cuánta inversión en tecnología necesitamos para progresar en el acceso remoto. La necesidad de algunas de estas tecnologías es indiscutible, como la de los sistemas avanzados de corte y coagulación, o los sistemas de neuromonitorización. ¿Y la robótica? Es indudable que la cirugía robótica actual es la forma más avanzada de cirugía endoscópica de la que disponemos. Y también que una parte importante del desarrollo futuro de la cirugía irá por este camino. El desarrollo de las técnicas estimula a su vez la creación de nueva tecnología y viceversa. El desarrollo tecnológico amplía en campo de lo factible, y la expansión de la cirugía endoscópica y de los abordajes de mínima invasión ha estado y está íntimamente ligada al desarrollo tecnológico. Aun así, como cirujanos debemos mantener un espíritu crítico y comprobar qué procedimientos aportan beneficio a nuestros pacientes y cuáles son más eficientes.
CONCLUSIONES
La tiroidectomía de acceso remoto incluye actualmente cuatro abordajes consolidados: la tiroidectomía transaxilar, la axilopectoral bilateral, la retroauricular y la transoral transvestibular. Todas ellas han demostrado ser técnicas seguras y eficaces para el tratamiento de la patología quirúrgica de la glándula tiroides, incluido el cáncer de tiroides. Cada una tiene sus indicaciones y sus limitaciones.
La justificación original para estos abordajes es primariamente cosmética (evitar una cicatriz visible en el cuello) y por lo tanto, además de cumplir criterios para la indicación, los pacientes deben tener un alto grado de motivación para optar por estos abordajes.
La introducción de diferentes tecnologías conlleva determinadas modificaciones en la técnica quirúrgica cuyo beneficio potencial, además del cosmético, debe ser demostrado.

