










Mi SciELO
 Servicios personalizados
Servicios personalizadosServicios Personalizados
Revista
Articulo
 texto en
texto en  Inglés (pdf)
Inglés (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares en
SciELO
Similares en
SciELO -
 Similares en Google
Similares en Google
Compartir

 Permalink
PermalinkArchivos Españoles de Urología (Ed. impresa)
versión impresa ISSN 0004-0614
Arch. Esp. Urol. vol.60 no.4 may. 2007
Equipamiento y tecnología en robótica.
Equipment and technology in robotics.
Declan Murphy, Ben Challacombe, Tim Nedas, Oussama Elhage, Kaspar Althoefer1, Lakmal Seneviratne1 y Prokar Dasgupta.
Department of Urology, Guys & St Thomas NHS Foundation Trust, and Kings College School of Medicine Department of Mechatronics1, Kings College London, UK.
Dirección para correspondencia
RESUMEN
Revisamos la evolución y el estado actual de los equipos robóticos aplicados a la urología. Asimismo describimos los desarrollos futuros en las áreas clave de la simulación de realidad virtual, mecatrónica y nanorobótica. Se revisa la historia de la tecnología robótica y su enmarque en el contexto de los sistemas actuales. Expertos en los campos relacionados de nanorobótica, mecatrónica y simulación de la realidad virtual revisan los importantes desarrollos futuros en estas áreas.
Palabras clave: Robótica. da Vinci®. Tecnología. Nanorobótica. Nanotecnologia.
SUMMARY
We review the evolution and current status of robotic equipment and technology in urology. We also describe future developments in the key areas of virtual reality simulation, mechatronics and nanorobotics. The history of robotic technology is reviewed and put into the context of current systems. Experts in the associated fields of nanorobotics, mechatronics and virtual reality simulation simulation review the important future developments in these areas.
Key words: Robotic. da VinciTM. Technology. Nanorobotics.
Introducción
Estamos viviendo una época interesante en el campo de los robots quirúrgicos. En los cinco últimos años la imaginación tanto de los pacientes como de los cirujanos se ha visto atraída por la llegada de la cirugía asistida por robot, los manipuladores telequirúrgicos y cirugía de telepresencia. En concreto la cirugía laparoscópica asistida por robot, ha dominado los titulares y los simposiums y eventos en todo el mundo en los últimos años y ha llevado a que, cada vez, mayor número de pacientes demanden esta técnica. La mayor parte de esta demanda es debida a la proliferación de los sistemas quirúrgicos da Vinci® (Intuitive Surgical, CA), especialmente en Estados Unidos, donde se han instalado más de 400 robots.
Los urólogos han adoptado rápidamente esta tecnología y la prostatectomía radical laparoscópica asistida por robot (PRLAR), es el procedimiento robótico más practicado a nivel mundial. De los 766 casos realizados en el 2002, en el año 2007 se estima que supere los 48.000 (1), lo que constituye el 39.5% del mercado de la prostatectomía radical en Estados Unidos.
Pero el monopolio del sistema da Vinci®, ha conducido al estancamiento en el desarrollo de la cirugía asistida por robot. Esta tecnología tiene sus raíces en el Stanford Research Institute (SRI), Sistema Green de Telepresencia, que fue desarrollado a principios de los 90 por Philip Green y otros investigadores en Stanford. La licencia comercial de esta tecnología fue posteriormente adquirida por el Dr. Fredrick Moll, que fundó Intuitive Surgical en 1995. El prototipo del sistema da Vinci® fue lanzado en 1997 y se ha hecho muy poco por actualizar el sistema desde que la Food & Drugs Administration (FDA) dió su aprobación en el año 2000. Por tanto la tecnología sigue siendo muy cara, muy voluminosa y de alguna manera obsoleta.
Este artículo esboza los interesantes progresos que han llevado al estado actual de la tecnología y los equipos robóticos. Sin embargo, como mucho de esto ya se ha descrito antes (2,3), nos concentraremos en las apasionantes tecnologías en desarrollo, especialmente en los campos de la simulación de la realidad virtual, mecatrónica y nanorobótica.
Definiciones e Historia:
Se ha definido un robot quirúrgico como un manipulador controlado por ordenador con sensibilidad, que puede ser reprogramado para mover y posicionar herramientas que lleven a cabo tareas quirúrgicas (4). Estrictamente hablando, la palabra robot quirúrgico no cumple con esta definición, y algunos autores han sugerido que el término cirugía asistida por ordenador describe de forma mas acertada la actual generación de instrumentos robóticos (5). Se ha utilizado una descripción de robots off-line y on-line para diferenciar entre las máquinas que llevan a cabo tareas pre-programadas y las que realizan acciones como respuesta a órdenes continuas (instrumentos tipo maestro-esclavo) (6). Cualquiera que sea la conclusión de ese pedante debate, el término robótico es de uso popular para describir el tipo de tecnología que nos ocupa aquí.
Los pioneros en este campo incluyen a Wickham y colaboradores del Guys Hospital and Imperial College, London, que desarrollaron el PROBOT a finales de los 80. El PROBOT utilizaba una estructura robótica, que guiaba un asa de diatermia para completar una resección transuretral de próstata (RTU). Tras estudios iniciales adoptando la patata como modelo de próstata, se continuó con ensayos clínicos en pacientes para demostrar la seguridad y viabilidad de esta tecnología (7). Este dispositivo era verdaderamente autónomo (robot off-line), y cumplía con las definiciones expuestas anteriormente. No obstante, nunca se demostraron diferencias convincentes con respecto a la RTU convencional.
Otros robots urológicos incluyeron el acceso robótico renal percutáneo PAKY-RCM que demostró mayor precisión pero tiempos operatorios más largos cuando se los comparó con humanos en un ensayo aleatorio mediante tecnología telerrobótica transatlántica (8,9).
Manipuladores Laparoscópicos Robóticos:
El desarrollo de los manipuladores laparoscópicos tales como el Automated Endoscopic System for Optimum Positioning (AESOP®, Intuitive Surgical, CA) y el EndoAssist® (Armstrong Healthcare, UK), sin duda, han encontrado un hueco en los procedimientos laparoscópicos urológicos. Estos instrumentos manejan el laparoscopio (cámara) con la voz, pedal o control infrarrojo del movimiento y proporcionan imágenes más estables y con menos choque de instrumentos que la asistencia humana (10). Son especialmente útiles en procedimientos tales como la prostatectomía radical laparoscópica, liberando al ayudante para usar dos puertos y además la imagen es muy estable. También permiten el concepto de único cirujano, prescindiendo de la necesidad de ayudantes quirúrgicos (11).
Sistemas Maestro-Esclavo:
Es el sistema quirúrgico da Vinci® (Intuitive Surgical, CA) es el que ha generado la mayoría de los titulares relacionados con la cirugía asistida por robótica. Se desarrolló a mediados de los 90 en el Stanford Research Institute (SRI), Sistema Green de Telepresencia, mientras que un competidor, el sistema Zeus® System (inicialmente Computer Motion; ahora propiedad de Intuitive Surgical), estaba bajo evaluación clínica. Es un sistema maestro-esclavo (robot on-line), mas que un robot verdaderamente autónomo. El cirujano se sienta en una consola remota al paciente, controlando 3 ó 4 brazos robóticos, que están acoplados a través de puertos laparoscópicos. Visión tridimensional (3D), 7 grados de libertad (DoF) de movimiento, y movimientos intuitivos de los instrumentos robóticos están entre sus teóricos beneficios sobre la cirugía laparoscópica convencional. La tecnología da Vinci® con sus ventajas y desventajas han sido descritas previamente (3).
Sensación de Fuerza e Identificación Tisular – Progresos Actuales y Futuros
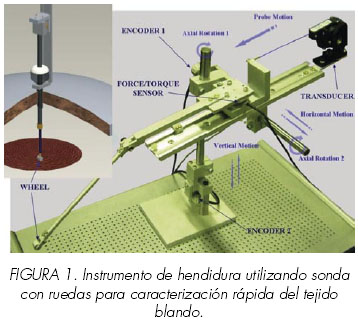
Con la llegada de los robots quirúrgicos especializados como el sistema quirúrgico da Vinci®, se ha proporcionado a los cirujanos modernos herramietas que ayudan durante operaciones complejas y pueden mejorar los resultados de los procedimientos quirúrgicos. Estos altamente sofisticados instrumentos robóticos incorporan tecnologías avanzadas tales como mecánica de precisión, visión mejorada y algoritmos avanzados de control de movimiento, permitiendo el manejo intuitivo y libre de temblor de las herramientas quirúrgicas. Sin embargo, existen limitaciones. La más notable reside en que el cirujano pierde toda la sensación táctil cuando opera con la ayuda del robot. El sentido del tacto que está disponible fácilmente durante la cirugía abierta, provee al cirujano de información valiosa sobre el lugar del procedimiento. La incapacidad para palpar órganos durante la cirugía puede conducir a un juicio erróneo de interacción dinámica entre la herramienta y el tejido blando. Estudios recientes han revelado que la falta de sensación táctil durante la cirugía asistida por robot puede llevar a un aumento en la agresión tisular y a un daño inintencionado del mismo, y los cirujanos a los que se les ha provisto de sensación de la fuerza ejercida, han mejorado considerablemente su resultados (12,13) (Figura 1).
Los esfuerzos actuales en algunos centros de investigación, se diriges a equipar los robots quirúrgicos con sensores y mecanismos de feedback (respuesta) que permiten devolver al cirujano la percepción o sensación táctil.
Debido a los avances en las micro-tecnologías, existe ahora una clara tendencia hacia el desarrollo de sensores miniaturizados que puedan medir las fuerzas de manipulación en el momento en que la herramienta entra en contacto con el tejido blando. Recientemente se ha integrado una mano quirúrgica situada al final de una herramienta laparoscópica con un sensor de tracción (14). La estructura hexápoda del sensor hecho de una aleación de aluminio que le proporciona un peso ligero y una solución rígida para adquirir señales de fuerza y torsión a través de cada uno de los seis ejes con una alta resolución de 0.05 N y 0.25 N en dirección radial y axial, respectivamente y con una escala de hasta 20 N. Recientemente ha sido desarrollada una micro mano (Sistemas microelectromecánicos MEMS) dirigida por un actuator piezoeléctrico integrado con semiconductor y montado en una superficie elástica (flexible) microfabricada, permitiendo la caracterización de las propiedades del tejido blando y una palpación realista utilizando un interfaz háptico (15).
También se han hecho avances empleando materiales piezoeléctricos para medir las fuerzas de contacto en el extremo de las herramientas quirúrgicas. Asimismo se han desarrollado sensores micro-mecánicos seleccionadores de fuerza que se pueden montar en las herramientas quirúrgicas (16,17).
Los sensores afirman tener una alta sensibilidad y comportamiento lineal en una amplia escala de hasta 15 N, permitiendo una información realista de la palpación.
Asimismo, se han logrado resultados muy prometedores basados en los principios de medida de la fibra óptica. Se pueden crean sensores de fuerza en miniatura usando cables de fibra óptica que lleven señales luminosas –que son moduladas en respuesta a las fuerzas aplicadas – desde una región de detección a un convertidor opto-electrónico. Recientemente, se ha desarrollado en el extremo de una herramienta quirúrgica un sensor de fuerza de 5 mm., de diámetro integrando tres elementos sensores de fibra óptica. Este sensor puede medir fuerzas a lo largo de tres ejes con una sensibilidad de 0.04 N y un rango de hasta 2.5 N (18). Las principales ventajas de estos sensores es que son inmunes a las interferencias electromagnéticas y compatibles con los sistemas de imagen de resonancia magnética. Basado en esto se utilizó un sensor de fuerza de fibra óptica de tres grados de libertad, en un robot neuroquirúrgico (compatible con resonancia magnética) para medir las fuerzas de interacción del tejido (19).
Sensores precisos y reproductores apropiados que reconstruyan las fuerzas medidas en la mano del usuario son en ambos casos componentes necesarios de interfaces hápticos que reflejen fielmente el sentido del tacto. Los sensores de fuerza se pueden utilizar como mecanismo de información alternativo para la identificación del tejido blando (p.e. zonas en las que están incrementadas la rigidez o la blandura), proporcionando al cirujano indicaciones visuales de la localización y gravedad de cualquier anormalidad en un órgano. Los intentos para identificar el tejido han permitido el desarrollo de varios instrumentos. Brouwer y colaboradores utilizaron un instrumento elástico uni-eje para medir la respuesta del tejido porcino tanto in vivo como ex-vivo (20). Se desarrolló otro instrumento para investigar in-vivo las propiedades visco-elásticas del tejido bajo pequeñas deformaciones en un solo eje (21). Asimismo se ha descrito una pinza endoscópica motorizada que fue utilizada para examinar tejidos porcinos in-vivo e in-situ, con cargas de compresión estática y cíclica (22).Una prueba mecánica desarrollada por el Laboratorio Harvard Biorobotics, trató de identificar la localización y propiedades de tumores basándose en pruebas de hendiduras estáticas (23). Una investigación llevada a cabo recientemente por el Kings College de London trataba de desarrollar instrumentos que considerarán una serie de distribuciones medidas como la sonda se desliza por la superficie. Este enfoque proviene de uno previo de hendiduras estáticas, permitiendo la identificación de todas las partes del tejido un órgano en poco tiempo (24).
Nanotecnología:
De la misma forma que la microtecnología en los años 80 condujo a nuevas herramientas para la cirugía, la nanotecnología emergente permitirá de forma similar avances adicionales, proporcionando mejor diagnóstico y nuevos instrumentos para la medicina. Se espera que los Nanorobots desarrollen nuevas capacidades, en el diagnóstico y tratamiento de enfermedades, monitorización de pacientes y cirugía mínimamente invasiva (25,26).
La capacidad de manufactura puede derivarse de las tendencias actuales y los nuevos métodos en fabricación, computación, transductores y manipulación. La arquitectura de las piezas para un nanorobot médico debe incluir los instrumentos necesarios para monitorizar los aspectos más importantes de su espacio de trabajo operacional: el cuerpo humano.
Equipos de nanorobots pueden colaborar para realizar complejas tareas predefinidas en algunos procedimientos médicos (27). Para alcanzar este objetivo, el proceso de datos, el suministro de energía y las habilidades de transmisión de datos se pueden solucionar a través de circuitos impresos integrados, usando los avances de la tecnologías derivadas de la nanotecnología y de los Sistemas de Integración a Gran Escala (Very Large System Integration) (diseño VLSI) (28). Un chip (CMOS), con diseño VLSI utilizando litografía ultravioleta profunda proporciona alta precisión y una forma comercial de fabricar sistemas nano-instrumentales y nano-electrónicos. La industria de los chips CMOS puede conducir con éxito a desarrollar los procesos de montaje necesarios para fabricar nanorobots, donde el uso conjunto de nanofotónica, nanotubos de carbono y nanocristales pueden incluso acelerar aún más los de niveles actuales de resolución de los dispositivos, variando entre 248nm y 157nm (29). El esfuerzo interdisciplinario impactará en la fusión de los nanoinstrumentos y la nanoelectrónica para construir nanorobots (30). El uso del lenguaje de descripción de hardware Verification Hardware Description Language (VHDL), es la metodología más común utilizada en la industria de la fabricación de circuitos integrados, para validar los diseños que permitan lograr una mejora real. Los nanorobots pueden ser útiles en una gran variedad de aplicaciones biomédicas, administración de fármacos, tales como regimenes de dosis basados en parámetros farmacocinéticos prefijados por ejemplo en tratamiento quimioterapicos (31,32). Una variedad de señales diferentes están directamente correlacionadas con problemas médicos específicos. Las señales químicas pueden servir para la identificación y actuación sobre un determinado objetivo terapéutico. Un tumor de una sola célula puede caracterizarse por una mutación endotelial específica con importantes implicaciones en el tratamiento. Las células endoteliales tienen un gran número de funciones y pueden jugar un importante papel en la salud humana. También forman parte de la estructura que forma el interior de los vasos sanguíneos, que se propagan a través de cualquier órgano o sistema.
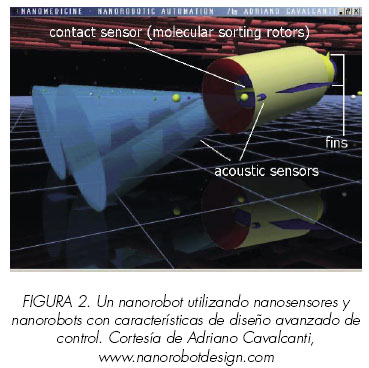
Factores como bajo consumo de energía o alta sensibilidad son algunas de las ventajas de los nanosensores. Los sensores nanobioelectrónicos usando nanocables como material para el montaje del circuito pueden alcanzar la máxima eficiencia en aplicaciones relacionadas con cambios químicos, permitiendo nuevas aplicaciones médicas (30). Usando sensores químicos los nanorobots pueden ser programados para detectar diferentes niveles de E-cadherina y beta-catenina como objetivos terapéuticos en tumores primarios y metastásicos. Los nanosensores integrados pueden ser utilizados para esa tarea con el fin de encontrar las diferentes concentraciones de señales de E-cadherina (33-35). Más allá de los sensores, los nanorobots pueden ser diseñados para la administración en un espacio preciso de quimioterapia local. Tal abordaje permite mantener la fuente del fármaco durante tanto tiempo como sea necesario en el torrente sanguíneo, evitando la extravasación hacia tumores no localizados retículo-endotelialmente, y evitando efectos secundarios nocivos (36).
La Figura 2 muestra un nanorobot desarrollado por Adriano Calvanti del CAN Center for Automation in Nanobiotech, Sao Paulo, Brasil.
El papel de la simulación de la realidad virtual y la robótica
La cirugía mínimamente invasiva se ha asociado durante tiempo con problemas de entrenamiento. En su inicio las técnicas quirúrgicas nuevas deben ser aprendidas por todos los tipos de cirujanos y estos deben ser capaces de aprender las técnicas con seguridad. Desde este punto de vista la evolución del aprendizaje de la cirugía laparoscópica proporciona un buen ejemplo para las técnicas robóticas.
Los procedimientos asistidos por robot son operaciones complejas en las que la precisión es vital y no es un entorno ideal de aprendizaje, por lo cual se necesitan otros entornos. Asimismo la cirugía asistida por robot tiene un coste asociado enorme de infraestructura tanto con el robot acoplado como con la consola operatoria. No entra en el presupuesto de muchas instituciones proporcionar un entrenamiento completo del robot.
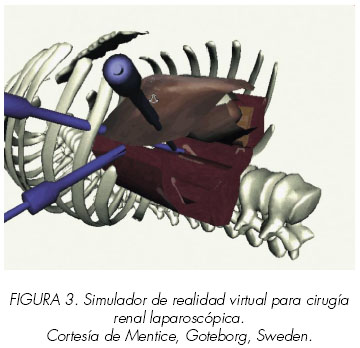
La realidad virtual nos ha demostrado ser efectiva en el entrenamiento quirúrgico y tiene los beneficios de proporcionar un entorno operatorio reproducible, en el que los parámetros métricos se pueden usar para monitorizar la actuación del cirujano (37,38). La capacidad para incorporar la anatomía individual del paciente en un simulador quirúrgico y practicar antes de la cirugía está solo a pocos años vista.
La realidad virtual ha demostrado ser por si misma la primera opción de aprendizaje en la cirugía laparoscópica debido a la evolución de los instrumentos de sensación háptica, estos instrumentos proporcionan al cirujano sensaciones táctiles semejantes a los de la cirugía real.
La posibilidad de utilizar la realidad virtual para simular los procedimientos robóticos es increíblemente apasionante. Desde el punto de vista del desarrollo, la información háptica no es necesaria, por lo que se puede eliminar gran parte del tiempo de programación y dedicarlo a investigar como incorporar más grados de libertad. Para un simulador robótico (con realidad virtual) solo se requiere, de la consola operatoria ahorrando el gasto de los brazos robóticos.
Los logros actuales en el software de realidad virtual (VR) están progresando hacia el desarrollo de abdómenes y pelvis totalmente interactivos; y no está lejos la capacidad para alterar el software e incluir los instrumentos robóticos.
El futuro de la cirugía robótica en conjunción con la realidad virtual (VR), puede permitir que un cirujano pre-opere, como entrenamiento, al mismo paciente reconstruyendo sus propias estructuras anatómicas.
Conclusiones
La introducción de la tecnología robótica a últimos del siglo XX, y a principios del XXI, anuncian una época apasionante para los cirujanos. Sin embargo, es evidente que dicha tecnología está dando sus primeros pasos, por lo menos en su aplicación clínica. Los prometedores progresos potenciales en la mecatrónica, nanotecnología y simulación de la realidad virtual esbozados en este artículo conducirán a un enorme salto a la próxima generación de tecnología y equipamiento robótico.
Agradecimiento
Los autores queremos expresar nuestro más sincero agradecimiento al Dr. Adriano Calvanti del CAN Center for Automation in Nanobiotech por su aportación sobre nanotecnología.
Bibliografía y lecturas recomendadas (*lectura de interés y ** lectura fundamental)
1. PEPLINSKI, R.: Past, present and future of the Da Vinci robot. 2nd UK Robotic Urology Course, 2006. [ Links ]
2. CHALLACOMBE, B.J.; KHAN, M.S.; MURPHY, D. y cols.: The history of robotics in urology. World J. Urol., 24: 120, 2006. [ Links ]
*3. CHALLACOMBE, B.J.; KHAN, M.S.; MURPHY, D. y cols.: Robotic technology in urology. Postgrad. Med. J., 82: 743, 2006. [ Links ]
4. DASGUPTA, P.; JONES, A.; GILL, I.S.: Robotic urological surgery: a perspective. BJU Int., 95: 20, 2005. [ Links ]
5. GUILLONNEAU, B.: What robotics in urology? A current point of view. Eur. Urol., 43: 103, 2003. [ Links ]
*6. SIM, H.G.; YIP, S.K.; CHENG, C.W.: Equipment and technology in surgical robotics. World J. Urol., 2006. [ Links ]
7. DAVIES, B.L.; HIBBERD, R.D.; TIMONEY, A.G. y cols.: The development of a surgeon robot for prostatectomies. Proc. Inst. Mech. Eng., 205: 35, 1991. [ Links ]
8. CHALLACOMBE, B.J.; KAVOUSSI, L.R.; DASGUPTA, P.: Trans-oceanic telerobotic surgery. BJU Int., 92: 678, 2003. [ Links ]
*9. CHALLACOMBE, B.; KAVOUSSI, L.; PATRICIU, A. y cols.: Technology insight: telementoring and telesurgery in urology. Nat. Clin. Pract. Urol., 3: 611, 2006. [ Links ]
10. KAVOUSSI, L.R.; MOORE, R.G.; ADAMS, J.B. y cols.: Comparison of robotic versus human laparoscopic camera control. J. Urol., 154: 2134, 1995. [ Links ]
11. ANTIPHON, P.; HOZNEK, A.; BENYOUSSEF, A. y cols.: Complete solo laparoscopic radical prostatectomy: initial experience. Urology, 61: 724, 2003. [ Links ]
12. WAGNER, C.; STYLOPOULOS, N.; HOWE, R.: The role of force feedback in surgery: Analysis of blunt dissection. Proc. IEEE 10th symp. on haptic interfaces for virtual Envir & Teleoperator systems. 2002. [ Links ]
13. DEML, B.; ORTMAIER, T.; SEIBOLD, U.: The touch, and feel in minimally invasive surgery. IEEE Int. workshop on haptic audio visual environments, and their applications , 33-38. Ottawa, Ontario, 2005. [ Links ]
14. SEIBOLD, U.; KUEBLER, B.; HIRZINGER, G.: Prototype of instrument for minimally invasive surgery with 6-axis force sensing capability. Proc. IEEE Int. conf. on robotics, and automation, 496-501. Barcelona, Spain, 2005. [ Links ]
15. MENCIASSI, A.; EISINBERG, A.; CARROZZA, M. y cols.: Force sensing microinstrument for measuring tissue properties, and pulse in microsurgery. IEEE/ASME Trans on mechatronics, 8: 10, 2003. [ Links ]
16. OTTERMO, M.; STAVDAHL, O.; JOHANSEN, T.: Palpation instrument for augmented minimally invasive surgery. Proc. IEEE/RSJ Int. conf. on intelligent robots, and systems, 3960-3964. Sendai, Japan, 2004. [ Links ]
17. DARGAHI, J.; PARAMESWARAN, M.; PAYANDEH, S.: A micromachined piezoelectric tactile sensor for an endoscopic grasper-theory, fabrication, and experiments. Journal of microelectromechanical systems, 9: 329, 2000. [ Links ]
18. PEIRS, J.; CLIJNEN, J.; REYNAERTS, D. y cols.: A micro optical force sensor for force feedback during minimally invasive robotic surgery. Sensors and actuators A., 115: 447, 2004. [ Links ]
19. SUTHERLAND, G.; McBETH, P.; LOUW, D.: NeuroArm: an MR compatible robot for microsurgery. International congress series, 1256: 504. Elsevier Science, 2003. [ Links ]
20. BROUWER, I.; USTIN, J.; BENTLEY, L. y cols.: Measuring in-vivo animal soft tissue properties for haptic modelling in surgical simulation vol. 81 69-74, 2001. Stud. Health Technol. Inform., 81: 69, 2001. [ Links ]
21. OTTENSMEYER, M.: In-vivo measurement of solid organ visco-elastic properties. Stud. Heatlh Technol. Inform., 85: 328, 2002. [ Links ]
22. BROWN, J.; ROSEN, J.; KIM, Y, y cols.: In-Vivo and In-Situ Compressive Properties of Porcine Abdominal Soft Tissues. Stud. Health Technol. Inform., Newport Beach, CA., 2003. [ Links ]
23. WELLMAN, P.; HOWE, R.: Modelling probe and tissue interaction for tumour feature extraction. ASME summer Bioengineering conference, Sun River, Oregon, 1997. [ Links ]
24. NOONAN, D.; LIU, H.; ZWEIRI, Y. y cols.: A dual-function wheeled probe for tissue viscoelastic property identification during minimally invasive surgery. International Conference on robotics and automation. Rome, Italy, 2007. [ Links ]
**25. CAVALCANTI, A.: Assembly automation with evolutionary nanorobots and sensor-based control applied to nanomedicine. IEEE Transactions on Nanotechnology, 2: 82, 2003. [ Links ]
26. FREITAS, R.A. Jr.: Nanomedicine - basic capabilities. www.nanomedicine.com, 1999. [ Links ]
27. CAVALCANTI, A.; FREITAS, R.A. Jr.: Nanorobotics control design: a collective behavior approach for medicine. IEEE Trans. Nanobioscience, 4: 133, 2005. [ Links ]
28. SRIVASTAVA, N.; BANERJEE, K.: Performance analysis of carbon nanotube interconnects for VLSI applications. IEEE/ACM ICCAD Int. Conf. on computer-aided design., 383-390, 2005. [ Links ]
29. BOGAERTS, W.; BAETS, R.; DUMON, P. y cols.: Nanophotonic waveguides in silicon-on-insulator fabricated with CMOS technology. J. Lightwave Technology, 23: 401, 2005. [ Links ]
30. CAVALCANTI, A.; SHIRINZADEH, B.; FREITAS, R.A. Jr. y cols.: Medical nanorobot architecture based on nanobioelectronics. Recent patents on nanotechnology. 1 ed. Bentham Science, 2007. [ Links ]
**31. KAWASAKI, E.S.; PLAYER, A.: Nanotechnology, nanomedicine, and the development of new, effective therapies for cancer. Nanomedicine: nanotechnology, biology & medicine, 101-109, 2005. [ Links ]
32. MUTOH, K.; TSUKAHARA, S.; MITSUHASHI, J. y cols.: Estrogen-mediated post transcriptional down-regulation of P-glycoprotein in MDR1-transduced human breast cancer cells. Cancer Sci., 97: 1198, 2006. [ Links ]
33. JANDA, E.; NEVOLO, M.; LEHMANN, K. y cols.: Raf plus TGFbeta-dependent EMT is initiated by endocytosis and lysosomal degradation of E-cadherin. Oncogene, 25: 7117, 2006. [ Links ]
34. SONNENBERG, E.; GODECKE, A.; WALTER, B. y cols.: Transient and locally restricted expression of the ros1 protooncogene during mouse development. EMBO J., 10: 3693, 1991. [ Links ]
35. TRUST SANGER INSTITUTE: Human chromosome 22 project overview. www.sanger.ac.uk/HGP/Chr22/ 2007. [ Links ]
36. OUVREUR, P.; GREF, R.; ANDRIEUX, K. y cols.: Nanotechnologies for drug delivery: application to cancer and autoimmune diseases. Progress in solid state. Chemistry, 34: 231, 2006. [ Links ]
*37. SEYMOUR, N.E.; GALLAGHER, A.G.; ROMAN, S.A. y cols.: Virtual reality training improves operating room performance: results of a randomized, double-blinded study. Ann. Surg., 236: 458, 2002. [ Links ]
38. FRIED, G.M.; FELDMAN, L.S.; VASSILIOU, M.C. y cols.: Proving the value of simulation in laparoscopic surgery. Ann. Surg., 240: 518, 2004. [ Links ]
![]() Dirección para correspondencia:
Dirección para correspondencia:
Declan Murphy
Department of Urology
1st Floor Thomas Guy House
Guys Hospital
London SE1 9RT (UK)
decmurphy@doctors.net.uk

