










Mi SciELO
 Servicios personalizados
Servicios personalizadosServicios Personalizados
Revista
Articulo
 texto en
texto en  Inglés (pdf)
Inglés (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares en
SciELO
Similares en
SciELO -
 Similares en Google
Similares en Google
Compartir

 Permalink
PermalinkArchivos Españoles de Urología (Ed. impresa)
versión impresa ISSN 0004-0614
Arch. Esp. Urol. vol.60 no.4 may. 2007
Prostatectomía robótica atérmica: perspectiva del ayudante quirúrgico.
Athermal robotic technique of radical prostatectomy: an assistant´s
Anil Mandhani, Roy Berryhill Jr. y Ash K. Tewari.
Robotic Prostatectomy Program & Urology Oncology Outcomes. Weill Medical College at Cornell University New York Presbyterian Hospital. Brady Urological Institute. New York, USA
Dirección para correspondencia
RESUMEN
La prostatectomía radical robótica está aumentando su populariad como alternativa a la prostatectomía radical abierta o laparoscópica. La planificación en la colocación de los puertos y el papel del ayudante son puntos cruciales para asegurar el éxito del procedimiento. Un óptimo posicionamiento de los mismos es de gran ayuda no sólo para el cirujano sino también para el ayudante. Una mejor asistencia durante la cirugía puede mejorar los resultados funcionales y asimismo hacer sentir al cirujano en la consola más cómodo. Este trabajo describe el papel del ayudante quirúrgico en la prostatectomía radical robótica.
Palabras clave: Prostatectomía radical robótica. Colocación de puertos. Ayudante. Cuarto brazo.
SUMMARY
Robotic radical prostatectomy is fast getting popular as an alternative to the open and laparoscopic radical prostatectomy. Planning for port placement and the assistants role are the two crucial yardsticks for the success of this procedure. Ideal port placement for radical robotic prostatectomy is not only crucial for the surgeon at the console but also for the patient side assistant. A better assistance could enhance the functional outcome of the procedure and at the same time could increase the comfort level of the surgeon at the console. This article describes the role of an assistant in robotic radical prostatectomy.
Key words: Robotic radical prostatectomy. Port placement. Assistant. Fourth arm.
Introducción
La visión tridimensional y magnificada, la escala de movimiento para filtrar el temblor y los 7 grados de libertad de movimiento dan a la prostatectomía radical asistida por robot (PRAR) una ventaja sobre el abordaje laparoscópico clásico. Estas ventajas resultan de mayor precisión en la disección y reconstrucción prostática, localizado en el fondo de la pelvis.
La cirugía robótica simula la cirugía abierta intentando mantener las ventajas de la cirugía mínimamente invasiva. Sin embargo, la curva de aprendizaje para un experto cirujano abierto sin experiencia laparoscópica, es mucho más corta que en la laparoscopia convencional. En un estudio, se estimó que la curva de aprendizaje era de 8-12 casos en la PRAR, versus 80-100 casos en la prostatectomía radical laparoscópica (PRL) (1). Esta curva de aprendizaje tan corta no podría alcanzarse sin un asistente con entrenamiento laparoscópico avanzado.
La consola y los brazos robóticos en un sistema robótico, se describen a menudo, con la analogía del maestro y el esclavo. Esto no es totalmente exacto ya que el maestro y la consola no dependen sólo de los brazos robóticos, sino también y de manera importante, de los movimientos del ayudante. Por lo tanto, el papel de éste no es sólo reforzar la actuación del cirujano en la consola, sino garantizar la seguridad, facilidad y rapidez de la cirugía. Las tareas del ayudante incluyen el manejo preoperatorio, la colocación del paciente, la planificación de la situación de los puertos, todo lo que se necesita, así como todo lo necesario para una más competente y productiva asistencia. Describimos aquí el papel del ayudante durante la técnica de PRAR.
¿Es superfluo tener ayudante en el lado izquierdo con un robot de cuatro brazos?
Muchos centros académicos utilizan dos ayudantes para la PRAR, bien sean residentes o fellows. La necesidad de un primer ayudante es indudable debido a la complejidad del procedimiento, pero con la reciente incorporación del robot de 4 brazos, el papel del segundo ayudante es controvertido.
El robot da Vinci® de 4 brazos (Intuitive Surgical, Sunnyvale, California) se ha introducido rápidamente y está ganando popularidad. El cuarto brazo puede colocarse en cualquier lado del paciente, suplantando el uso de un ayudante. De hecho, Sundaram y cols., han demostrado que el cuarto brazo puede efectivamente usarse en lugar de un ayudante del lado izquierdo (2). De forma similar se ha descrito en la PRAR retroperitoneal, usándolo como ayudante del lado derecho (3). El cirujano que opera cambia del brazo derecho al cuarto brazo pisando el pedal de embrague de la consola. En el cuarto brazo se suele emplazar una pinza de agarre tipo Prograsp para traccionar de la próstata, rotarla, etc. pudiéndolo dejarlo fijo en una posición (3).
Un argumento a favor del uso del cuarto brazo es la, a veces, difícil comunicación entre el ayudante y el cirujano (2). Pero esta línea de razonamiento es debatible ya que, de cualquier manera, la próstata no puede ser extirpada sin un ayudante en el lado del paciente.
Consideramos que un ayudante humano proporciona una ayuda inestimable en lo que respecta a retracción interactiva en lugar de retracción fija proporcionada por el cuarto brazo robótico. Tener un cuarto brazo robótico también puede interrumpir la curva de aprendizaje tradicional, el cirujano a menudo va progresando en transición gradual del lado izquierdo al derecho y finalmente a la consola. Este método de aprendizaje es especialmente valioso para los cirujanos noveles, proporcionando un aprendizaje óptimo para entender cada paso esencial y crítico de la PRAR.
Preparando al paciente para la cirugía
Aparte del manejo adecuado de la anticoagulacion (dicumarínicos, antiagregantes, etc.), la preparación preoperatoria más efectiva es animar a los pacientes a reducir peso y a adoptar una mentalidad de hacer ejercicio. Se debe tener en cuenta la existencia de cicatrices abdominales previas a la hora de crear el neumoperitoneo, usando bien una aguja de Veress o la técnica de Hasson (visualización directa). De hecho, la observación cuidadosa de las cicatrices puede ayudar para planear la adhesiolisis necesaria. Como ayudante, se debe estar pendiente de las tareas relacionadas con la anestesia, tales como la inserción de la sonda nasogástrica o el apoyo de la cabeza en posición de Trendelenburg. La restricción de fluidos es particularmente importante durante la operación para evitar la congestión de la cara y el cuello e igualmente el campo quirúrgico con excesiva producción de orina.
El ayudante debe también valorar la laxitud de la piel escrotal, para intentar prevenir el neumoescroto (Figura 1). Este se desarrolla en muchos pacientes pero en algunos de manera importante, probablemente dependiendo de algún proceso de la túnica vaginal previo (hidrocele, etc.), o de una hernia subclínica. Hemos observado que en las personas mayores, donde la piel escrotal es laxa se desarrolla un importante neumoescroto y los pacientes presentan importante dolor e inflamación en el periodo postoperatorio. Esto se puede minimizar proporcionando un apoyo y compresión escrotal fuerte en el periodo postoperatorio inmediato.

Colocación del paciente
Antes de la inducción anestésica, los muslos del paciente se colocan un poco más allá de la hendidura de la mesa, para compensar un posible desplazamiento proximal del paciente con el Trendelenburg extremo. Esto evita la recolocación, una vez que el paciente está anestesiado. Las piernas del paciente deben estar sujetas a las perneras y en posición de litotomía. Después de aplicar medidas de compresión mecánica en las extremidades inferiores los brazos del paciente se aseguran a los lados. También, se protegen ambas manos usando espuma plástica, y se apoyan en sus soportes. Estos soportes de colocan de forma que haya espacio suficiente para los ayudantes y así evitar la presión involuntaria en las manos por los brazos robóticos (B y D en Figura 2). De forma similar se utiliza espuma y cinta adhesiva para sujetar ambos hombros en forma de cruz de San Andrés sobre el pecho, contrarrestando los efectos de la gravedad del paciente en posición de Trendelenburg extremo (C en Figura 2). Sobre la cara se colocan unos protectores de espuma adaptados al paciente así como un reposacabezas para evitar las lesiones por decúbito o compresión. (A en Figura 2).

Es aconsejable realizar una simulación preoperatoria de la colocación, en pacientes con movimiento restringido de abducción y flexión de la cadera. Para estos pacientes especiales, en lugar de utilizar perneras convencionales, se deberían usar barras extensoras o apoyos para las piernas en el borde de la mesa, dependiendo de la altura del paciente (Figura 3).

Colocación de los Puertos
La colocación de los puertos es un paso crítico que condiciona de manera directa el éxito de la cirugía. Cada cirujano tiene un abordaje diferente, pero, como norma, si uno se atiene a las bases científicas de la instrumentación endoscópica, el proceso quirúrgico invariablemente tiene éxito.
Al igual que en la laparoscopia convencional, la variedad de instrumentos disponible es limitada y alcanzar la estructura anatómica objeto del procedimiento a veces es difícil. En la PRAR la anastomosis vesicouretral es típicamente el límite más lejano para los instrumentos robóticos. Esta longitud es invariablemente dependiente de la longitud funcional de cada instrumento robótico. Una vez que la cámara y los puertos robóticos están colocados, no se puede variar su colocación, o como mínimo es potencialmente peligroso. La falta de estrategia previa o una colocación del puerto sin planificar, desviaría la atención del cirujano de los pasos y detalles de la técnica y en su lugar mantendría al cirujano luchando por solucionar sus limitaciones en los movimientos, comprometiendo el éxito del procedimiento.
La posición del puerto de la cámara ha sido cuidadosamente descrita por Hemal y cols., debe ser a 2.5 cm., por debajo del ombligo (4). Sin embargo, esto no se puede aplicar como regla universal. La posición umbilical varía dependiendo de la altura y el peso del paciente y la posición del puerto debe adaptarse apropiadamente a cada tipo de cuerpo.
En un estudio de análisis anatómico geométrico, se señaló la sínfisis del pubis como el punto óptimo para calcular el emplazamiento de los puertos robóticos. Los 18 cms., que mencionan los autores desde la sínfisis del pubis se basaba en la longitud funcional del brazo robótico disponible en ese momento (5). De forma similar la distancia entre dos puertos robóticos cualquiera, en un eje transversal se sugirió que fuera de 11-24 cm., un rango que parece demasiado amplio (5, 6).
En laparoscopia convencional, Rassweiller y cols., sugirieron, para la posición ideal de sutura, que el ángulo entre dos brazos debería ser de aproximadamente 45º (6). Pero este ángulo de 45º, no se puede aplicar a los brazos robóticos, ya que los 7 grados de movimientos disponibles en el extremo distal permiten que la aguja se mueva en cualquier dirección, obviando la necesidad de un ángulo ideal. La distancia entre dos brazos robóticos es importante para evitar el choque y el cruzamiento entre los brazos robóticos y los brazos del ayudante y así ganar una máxima amplitud de movimientos.
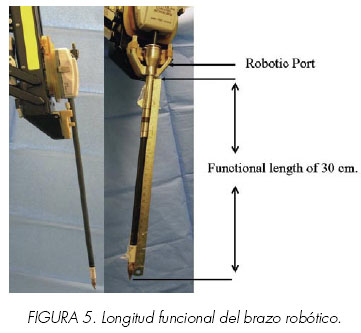
Como es difícil palpar la sínfisis del pubis en pacientes obesos, usamos la raíz del pene como punto de referencia para calcular la distancia para el puerto de la cámara. Seguimos la sencilla regla de 20, independientemente del peso y altura del paciente. La raíz del pene es un punto fácil de visualizar, tiene una buena correspondencia con la uretra membranosa, y su situación permanece sin cambios incluso después de la creación del neumoperitoneo, haciéndola ideal como punto de referencia (Figura 4). Dado que la longitud funcional de nuestros instrumentos robóticos actuales es exactamente de 30 cm (Figura 5), calculamos una distancia segura de 20 cm entre el puerto de la cámara y la raíz del pene. La distancia se incrementa, como esperábamos en 2 ó 3 cm, después del neumoperitoneo (Figura 6). En nuestros últimos 120 casos no hemos encontrado ningún problema con este cálculo, con independencia de la altura o el Índice de Masa Corporal (IMC) de los pacientes.


Una vez establecido el neumoperitoneo, los puertos del brazo robótico se colocan a 20 cm de la raíz del pene y 20 cm separados uno del otro en el eje transversal, usando la raíz del pene como puerto de referencia (Figura 4).
Puerto de la cámara y creación del neumoperitoneo
La creación de un neumoperitoneo es similar tanto en los procedimientos laparoscópicos convencionales como en los asistidos por robot. Insertamos un trócar (Ethicon, Somerville, New Jersey) con la cuchilla interior dirigida medialmente. Esta orientación de la cuchilla es importante, ya que más tarde, al final del procedimiento se hará una incisión vertical en la fascia para poder recuperar la pieza quirúrgica. En pacientes obesos, es mejor usar siempre un trócar largo para la cámara. Esto ayudará a evitar desplazamientos involuntarios del puerto debido a los frecuentes y fuertes movimientos de giro del brazo de la cámara.
Dirección de entrada de los puertos robóticos
Todos los trócares deberían ser insertados con su cánula en dirección perpendicular a la superficie de la piel. Esto permite una amplia variación de movimiento para los instrumentos, especialmente los puertos robóticos, ya que los instrumentos necesitan moverse de un extremo del campo (p.e. vasos ilíacos derechos), al lado opuesto (liberar el colón sigmoide) (Figura 7). Con los puertos robóticos colocados oblicuamente, el peritoneo se queda a modo de flap restringiendo los movimientos de los instrumentos, Esto puede complicar la disección apical y también causar dificultades en la anastomosis, especialmente en los puntos más laterales.

Colocación de los puertos de los ayudantes
Los puertos de los ayudantes (12 mm el de la derecha y 5 mm el de la izquierda), están normalmente emplazados proximalmente a los puertos robóticos y a unos dos traveses de dedo de la cresta ilíaca superior (Figura 8). Los puertos colocados demasiado cerca de la cresta ilíaca favorecen que los instrumentos tengan que pasar peligrosamente cerca de los vasos ilíacos externos. Estos puertos deben colocarse una vez que se haya comprobado que la reflexión del colon no está en la trayectoria con la cánula a través del peritoneo. Esto se lleva a cabo presionando con un dedo en el abdomen en el lugar donde se ha planeado colocar el trócar y visualizando la trayectoria desde dentro de la cavidad peritoneal. Nuestros puertos auxiliares son puertos que requieren dilatar las fascias y aponeurosis para hacerlos entrar en la cavidad peritoneal. Por tanto, deben ser insertados con precaución y bajo visión directa.

Puerto para el irrigador/aspirador
El puerto de succión es un puerto de 5 mm y se inserta en el borde lateral del músculo recto abdominal, con objeto de evitar lesiones involuntarias en los vasos epigástricos inferiores. Este puerto de succión debe estar colocado cefálico al puerto de la cámara, usando un terminal largo para llegar hasta la uretra membranosa (Figuras 7 y 8). Manteniendo el puerto de la cámara justo a la izquierda del ombligo, queda espacio suficiente entre éste y el puerto robótico derecho. Usamos un total de seis trócares, con tres puertos a la derecha de la cámara y sólo dos puertos a la izquierda. Si el puerto de succión se coloca muy abajo, se obstaculizan los movimientos de los instrumentos robóticos del lado izquierdo, creando incomodidad al ayudante del lado derecho. Un puerto colocado demasiado cefálico, provoca que el extremo del puerto de aspiración atraviese más el abdomen, incrementando el riesgo de lesión intestinal. Esto es particularmente peligroso para un ayudante sin experiencia en laparoscopia convencional.

Acoplando el robot
Antes de acoplar el robot al paciente, el ayudante debe asegurarse de que el brazo de la cámara esté totalmente vertical y flexionado con la segunda articulación hacia el lado izquierdo del paciente (Figura 10). Cuando en la consola hay un cirujano diestro, el brazo robótico dominante (brazo derecho) se mueve más que el brazo no dominante. La distancia entre los postes de la primera y la tercera articulación deben ser igual a dos palmos. Esta distancia invariablemente establece la posición de apoyo del carro sobre el suelo. Con esta colocación ideal, la distancia desde el centro de la columna del robot al borde de la mesa es normalmente entre 50 y 60 cm.

Esta cuidadosa colocación de la torre ayuda a conseguir una posición ergonómica de los brazos robóticos imitando la de los brazos humanos en la cirugía abierta. Mientras se acopla el robot el ayudante debe asegurarse de que cualquier lámpara de quirófano no esté en la trayectoria de entrada de los brazos robóticos cubiertos con las fundas estériles. El brazo de la cámara se debe acoplar el primero y los instrumentos robóticos deberán ser insertados despacio bajo visión directa con el brazo robótico embragado. Se logra una posición natural, lateralizando los brazos del robot, después de que el robot se ha acoplado a los trócares. Para lateralizar el brazo robótico, se pulsa el botón sobre la primera articulación y se mueve a su posición más alta y más lateral.
Papel del ayudante
El papel del ayudante es muy importante para reducir el tiempo total de quirófano. Con las sugerencias que hemos descrito anteriormente, el tiempo total desde la incisión de la piel hasta el principio del tiempo en la consola se puede reducir a 8-12 minutos.
Principios básicos de cambio de instrumentos por el ayudante
De acuerdo con los principios de la laparoscopia convencional, la mayoría de los cambios de instrumentos se realizan sin realmente ver la trayectoria de los mismos. Maniobras no apropiadas pueden dañar los vasos ilíacos opuestos y /o el colón, ya que su entrada es ciega. Por eso, el ayudante debe tener una trayectoria específica en su mente, mientras cambia los instrumentos. La mejor forma de lograrlo es dirigiendo el instrumento hacia el pene, generalmente con una inclinación anterior y con un movimiento lento y suave. Se debe prestar especial atención a cualquier resistencia, aunque sea ligera, mientras se avanza con los instrumentos.
Ayudante del lado derecho
El ayudante del lado derecho juega un papel crucial en el procedimiento. El conocimiento básico de la laparoscopia convencional ayuda facilitando la complejidad del procedimiento y contribuye a la seguridad del paciente. La comunicación (sin palabras) entre el cirujano en la consola y el ayudante del lado derecho acelera el procedimiento y se debe llegar a una compenetración perfecta.
Con la técnica atérmica de PRAR, la colocación adecuada de clips tipo Hemo-o-Lock® (Weck Closure System, Research Triangle Park, North Carolina) es un paso importante para el ayudante del lado derecho. La cantidad de tejido que el cirujano de la consola trata de controlar debe orientar al ayudante para escoger entre clips de 5 mm ó 10 mm. Usando el puerto del aspirador para las tijeras se ahorra tiempo eliminando el paso de cortar el punto desde el lado derecho, evitando así el cambio de los instrumentos robóticos (de portagujas a tijeras o viceversa). Si se usa el puerto del aspirador para las tijeras, entonces el instrumento debería introducirse en dirección a la pared abdominal anterior para no lesionar el intestino.
Cuando se extraen las agujas, uno retirará el portagujas laparoscópico convencional despacio hasta que la aguja haya entrado en la cánula y entonces, con un suave pero rápido movimiento, se saca la aguja del puerto. Cualquier resistencia cuando la aguja penetra en la cánula debe hacer que el ayudante pare y repita metódicamente el movimiento. Si, a pesar de repetidos intentos, se sigue sintiendo resistencia, el cirujano ayudará al ayudante dirigiendo la cámara a la cánula. Un cirujano con experiencia puede incluso avanzar la lente de la cámara dentro de la cánula del ayudante para lograr recuperar la aguja perdida dentro del puerto.
Aspiración e Irrigación
La aspiración/irrigación es una de las más importantes y difíciles tareas, que debe llegar a dominar el ayudante del lado derecho. La succión debe ser intermitente para prevenir la pérdida del neumoperitoneo. El extremo del aspirador debe permanecer cerca del área de operación para que el humo pueda ser aspirado directamente sin nublar la visión. De forma similar la irrigación a presión ayuda a mantener el campo limpio, especialmente de la hemorragia venosa.
Mientras se irriga se debe dirigir la fuerza del chorro lejos de las lentes o bajo una capa de tejido para evitar que salpiquen pequeñas gotas. Esta maniobra de aspiración/irrigación requiere coordinación con los movimientos del cirujano. La succión excesiva puede causar pérdida del neumoperitoneo con el consiguiente riesgo de desplazamiento de los puertos robóticos. Este efecto no deseado podría requerir tiempo operatorio extra para reestablecer el trócar además de aumentar la incisión en la fascia que luego hay que cerrar.
Ayudante del lado izquierdo
Uno de los papeles cruciales desempeñados por el ayudante del lado izquierdo es suministrar las lentes apropiadas (30 grados hacia arriba, 30 grados hacia abajo, ó 0 grados), así como que estén siempre limpias y con una temperatura cercana o por encima de la corporal. La estrategia que seguimos en el uso de las lentes es utilizar una de 30º hacia arriba para la inicial movilización de la vejiga y la próstata. Se sigue con una lente de 0º para retirar la grasa de la superficie anterior de la próstata, exposición de la fascia endopélvica, punto de tracción sobre la cara anterior, punto del cuello vesical (7), disección apical de la próstata posterior y anterior y la anastomosis vesicouretral. Una lente 30º hacia abajo se usa para la incisión del cuello de la vejiga, vesículas seminales y conductos deferentes, control de los pedículos prostáticos, y disección de los haces neurovasculares. Como término medio hay de tres a cuatro cambios de lente en un procedimiento habitual (8).
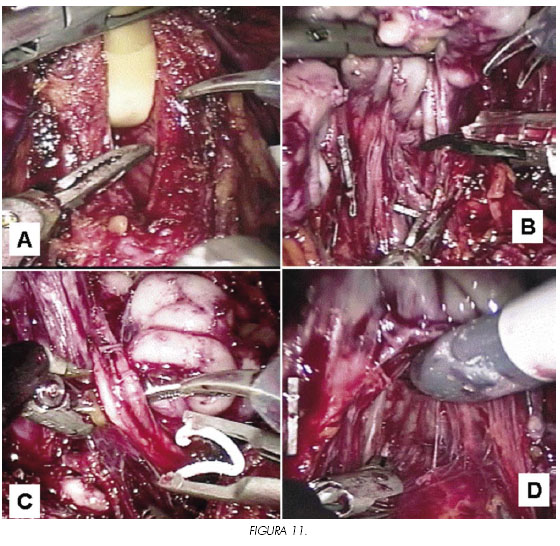
El ayudante del lado izquierdo juega también un papel importante en proporcionar tracción durante la disección del cuello posterior de la vejiga, los conductos deferentes y vesículas seminales (A, B, C en la Figura 11), haz neurovascular contralateral, fascia de Denonvillier, y la parte posterior del ápex prostático. Esta tracción es crucial para la técnica atérmica, ya que el cirujano de la consola necesita usar las dos manos para disecar los pedículos prostáticos laterales, el tejido alrededor del haz neurovascular, y crear espacio para aplicar los clips que permiten un adecuado control vascular (B y C en la Figura 11).
Otro paso muy importante es la anastomosis vesicouretral. En este momento, el ayudante del lado izquierdo debe movilizar el extremo de la sonda Foley dentro y fuera del muñón uretral mientras el cirujano realiza la sutura. El ayudante del lado derecho podría realizar este paso pero la aspiración/irrigación es invariablemente necesaria, además de retraer y asegurar la sutura de la anastomosis después de cada punto.
Recuperación de la pieza quirúrgica y cierre de los puertos
Un dispositivo Endocatch® se introduce a través del puerto de 12 mm del lado derecho justo después de que la próstata este liberada completamente. La cuerda adjunta a la endo-bolsa se deja colgando fuera del puerto del ayudante del lado derecho. Después de completado el procedimiento de la consola, el hilo largo de la endo-bolsa se sujeta con unas pinzas de agarre y se transfiere desde el puerto del ayudante del lado derecho hasta el puerto de la cámara bajo visión directa y la cuerda se saca del abdomen a través de este trócar. Se amplia entonces, la incisión para-umbilical del puerto de la cámara dependiendo del volumen de la próstata y se retira la bolsa con ella. Como la mayoría de los puertos son auto dilatables, el puerto de la cámara es el único que requiere cierre fascial.
Bibliografía y lecturas recomendadas (*lectura de interés y ** lectura fundamental)
*1. AHLERING, T.E.; SKARECKY, D.; LEE, D. y cols.: Successful transfer of open surgical skills to a laparoscopic environment using a robotic interface: initial experience with laparoscopic radical prostatectomy. J. Urol., 170: 1738, 2003. [ Links ]
2. SUNDARAM, C.P.; KOCH, M.O.; GARDNER, T. y cols.: Utility of the fourth arm to facilitate robot assisted laparoscopic radical prostatectomy. BJU, 95: 183, 2005. [ Links ]
3. ESPOSITO, M.P.; ILBEIGI, P.; AHMED, M. y cols.: Use of fourth arm in Da Vinci robot assisted extra peritoneal laparoscopic prostatectomy: novel technique. Urology, 66: 649, 2005. [ Links ]
4. HEMAL, A.; EUN, D.; TEWARI, A. y cols.: Nuances in the optimum placement of ports in pelvic and upper urinary tract surgery using the Da Vinci robot. Urol. Clin. N. Am., 31: 683, 2004. [ Links ]
*5. PICK, D.L.; LEE, D.I.; SKARECKY, D.W. y cols.: Anatomic Guide for Port Placement for Da Vinci Robotic Radical Prostatectomy. J. Endourol., 18: 572, 2004. [ Links ]
6. RASSWEILER, J.; FREDE, T.; GUILLONEAU, B.: Advanced laparoscopy. Eur. Urol., 42: 1, 2002. [ Links ]
7. TEWARI, A.K.; RAO, S.: Anatomical foundations and surgical maneuvers for precise identification of the prostatovesical junction during robotic radial prostatectomy. BJU Int., 98: 833, 2006. [ Links ]
*8. TEWARI, A.; PEABODY, J.; SARLE, R. y cols.: Technique of Da Vinci robot-assisted anatomic radical prostatectomy. Urology, 60: 569, 2002. [ Links ]
![]() Dirección para correspondencia:
Dirección para correspondencia:
Anil Mandhani
525 East 68th Street
Starr 900
New York, NY 10021
U.S.A.
anilpall@yahoo.com
anm9118@nyp.org

