










 Servicios personalizados
Servicios personalizados
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Citado por Google
Citado por Google  Similares en
SciELO
Similares en
SciELO  Similares en Google
Similares en Google 
 Permalink
Permalink
Introducción
Según Rochester,(1) la mano y su capacidad de movimiento como un sistema o de manera independiente de cada uno de los dedos, ha sido clave en el desarrollo de la especie humana dada su gran capacidad de adaptación según las demandas funcionales. Todas las estructuras de la mano y su relación entre sí juegan un papel determinante en la funcionalidad de esta, que principalmente viene dada por amplios arcos de movilidad que nos dotan de motricidad fina y gruesa, así como por el movimiento de pinza, que se diferencia del realizado por los primates por la longitud del primer dedo en la mano humana y la posibilidad de movimientos coordinados específicos que han permitido la construcción y uso de herramientas diversas, generando cambios morfológicos representados en un amplio espectro de agarres que permiten a la mano la realización de múltiples tareas.
Con base en lo expresado en el documento Biomechanics of the digit,(2) el conocimiento de los biomecanismos involucrados en el movimientos de los dedos y la generación de fuerza a partir de estos es de fundamental importancia en el estudio de la mano, pues se puede ver afectado por factores tales como la integridad del sistema articular, nervioso, tendinoso y de poleas a nivel digital, o la fuerza o trabajo de los músculos tanto extrínsecos como intrínsecos, que están determinados por el área transversal o el volumen respectivamente, y todos trabajando en sinergia para dicho fin.
Gracias a los arcos de movimiento y a la fuerza generados por los dedos y que difieren entre sí, se producen múltiples movimientos en relación con los objetos. Entre estos se encuentra la pinza de precisión, de oposición, direccional, la oposición del primer dedo sobre la falange media del segundo dedo, o la maniobra de agarre de gancho, gruesa y fina. Dichos movimientos son, según Duncan y col.(3) los que realizan la mayoría de las funciones de la mano.
La fuerza de los dedos también depende de la antropometría de la mano; la relación entre su anchura y longitud, la longitud de la palma y la circunferencia de la muñeca, así como de la posición en la que se ejerce la fuerza, según los hallazgos de estudios realizados por diferentes autores acerca de la fuerza de los dedos y al empuñar según la forma del objeto con el que se mida.(4) Asociado a esto, se debe evaluar la diferencia entre las medidas antropométricas entre razas, siendo los afroamericanos los de mayores mediciones, seguidos por los indios americanos, caucásicos, hispanos y finalmente los asiáticos.(5)
Las entidades patológicas que afectan a la fuerza de la mano y de los dedos de manera individual tienen diferentes etiologías. Pueden tener su origen en el sistema nervioso central, el sistema nervioso periférico (afectando a la placa motora), ser secundarias a enfermedades endocrinológicas, enfermedades de origen reumatoide (afectando a la estabilidad y la función articulares), enfermedades autoinmunes; o pueden ser ocasionadas por lesiones traumáticas de la extremidad superior, lo que incluye lesiones que comprometen el plexo braquial o los nervios periféricos, lesiones que afecten a los músculos y/o tendones en el brazo, el antebrazo o la misma mano. Algunas de las enfermedades que tienen origen en el sistema nervioso central son: esclerosis múltiple, esclerosis lateral amiotrófica (ELA), la enfermedad de Guillan Barré, tumores cerebrales y accidentes cerebrovasculares, ya sea isquémicos o hemorrágicos. Todas son entidades patológicas que van a causar una pérdida de la movilidad de la extremidad superior entre otras tantas afectaciones del cuerpo humano, con rangos de recuperación funcional variables, lo cual va a influir directamente en los resultados de medición de la fuerza tanto durante el agarre como en la flexión individual de cada dedo (pinza).
Cuando el problema se localiza a nivel del antebrazo o de la mano y se trata de problemas óseos, de nervio periférico, musculares o articulares, existe la posibilidad de recuperar la funcionalidad completa según la patología subyacente. Algunas de estas enfermedades son: síndrome del túnel del carpo, secundario a movimientos repetitivos que generan lesión del nervio mediano de severidad variable y común en población trabajadora de mediana y avanzada edad;(6) artritis de la mano, relacionada con dolor crónico, disminución de la fuerza de agarre y de los arcos de movimiento y rigidez articular que en conjunto derivan en alteración de la función de la mano;(7) y otras lesiones traumáticas, que tras una reparación primaria o secundaria tienen un pronóstico de recuperación total que varía según el mecanismo de lesión y el tiempo desde el evento hasta el tratamiento definitivo. En algunos casos el manejo es quirúrgico, mientras que en otros la terapia física es una buena alternativa.
Para evaluar el resultado del tratamiento escogido, es de vital importancia conocer la fuerza esperada en individuos sanos. Se han descrito en la literatura múltiples pruebas y elementos de evaluación para tal medida, como las bombas neumáticas, los medidores de resorte, dispositivos electrónicos y dinamómetros hidráulicos,(8) los cuales miden un valor de fuerza pico de la mano. Estas mediciones han sido utilizadas no solo para la evaluación preoperatoria y postoperatoria de los pacientes, sino también para valorar la movilidad en pacientes ancianos y el estado nutricional de diversos grupos etarios que se relaciona con estos resultados. Debido a esto, el uso clínico de esta herramienta podría aplicarse como tamizaje de salud en la población general.(9)
El estudio realizado por Massy-Westropp y col.(8) revela diferencias entre las mediciones hechas con dispositivos electrónicos e hidráulicos, por lo cual estos no pueden ser intercambiados de manera indiscriminada durante el seguimiento de los pacientes; sin embargo, el grado de confianza para los resultados de cada uno es aceptable. Otros dispositivos, como el dinamómetro de agarre, han sido creados en busca del diseño adecuado para pacientes con diferentes condiciones, sin embargo, los resultados no son equiparables a otros dispositivos por diferencias según la presión aplicada sobre los mismos.(10) Así mismo, la existencia de otros dispositivos, como el pinchómetro, diseñados para la medición de la fuerza de agarre, la pinza lateral y distal, se usan con frecuencia para el primer y segundo dedos,(11) pero no son ideales para la medición de la fuerza de cada uno de los dedos de forma individual.
El presente trabajo descriptivo busca aclarar conceptos clave en la biomecánica y la generación de fuerza en los dedos, así como mostrar el proceso de diseño y elaboración de un dispositivo novedoso para medir de forma independiente la fuerza de los dedos.
Material y método
Realizamos diseño asistido por computador (CAD por sus siglas en inglés: computer assisted design) de un dispositivo sin equivalente en la actualidad, hasta donde podemos conocer, que permite la medición de manera individual de la fuerza de los dedos. Tuvimos en cuenta parámetros como: tamaño del dispositivo adaptable a distintos usuarios, ubicación de los sensores, transmisión de la fuerza a los sensores y uso en ambas manos. Para la interacción del paciente con el dispositivo creamos una interfaz de usuario, donde se muestra la medición de fuerza en tiempo real y esta se puede almacenar en una tabla de Excel® para su posterior tratamiento, teniendo como característica a resaltar la medición individual de fuerza y arcos de movilidad de cada dígito.
Acondicionamiento sensores
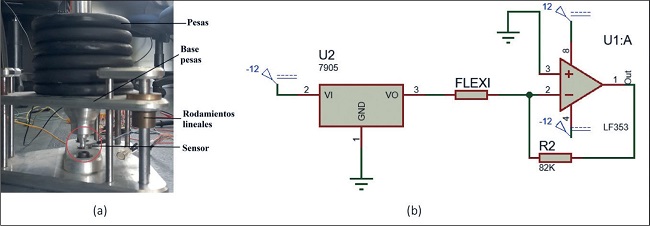
Para la medición de la fuerza elegimos un sensor del tipo Flexiforce A301 de la empresa TESKA® (EE.UU.). Se trata de un sensor integrado dentro de una membrana de circuito impreso flexible de poco espesor, el cual es totalmente plano, lo cual permite colocarlo con facilidad entre dos piezas de la mecánica del sistema y permitir así la medición de la fuerza que se ejerce sin perturbar la dinámica de las pruebas. Estos sensores se pueden utilizar para medir fuerzas estáticas y dinámicas empleando una tecnología basada en la variación de resistencia eléctrica del área sensible cuando la misma es excitada tras la aplicación de una fuerza sobre el área activa de detección, lo cual se traduce en un cambio en la resistencia eléctrica, donde esta variación de resistencia es una función inversamente proporcional a la fuerza aplicada. Cuando el sensor no tiene un valor de carga presenta una resistencia elevada. El comportamiento de estos sensores se puede aproximar por un comportamiento lineal.
Para su caracterización empleamos el dispositivo mostrado en la Fig.1. Este equipo consta de una guía para colocar pesos conocidos, los cuales se van aumentando gradualmente para obtener una curva de calibración. Presentamos el circuito utilizado para acondicionar la señal del sensor en la Fig. 1B. Partiendo del hecho de que el sensor es de efecto resistivo y tiene un comportamiento lineal, utilizamos un circuito con amplificador operacional en configuración inversor, en donde la resistencia de entrada es el sensor (FLEX1).
Las gráficas de peso (en Kg) frente a voltaje (V) obtenidas se presentan dentro de la Fig.2. Como se observa en ellas, los sensores efectivamente tienen un comportamiento lineal, pero presentan variaciones mínimas al momento de retirar el peso, lo que indica que la histéresis tiende a ser pequeña, casi cero. Con este proceso se conoce el comportamiento del sensor frente a distintas cargas.

Implementación
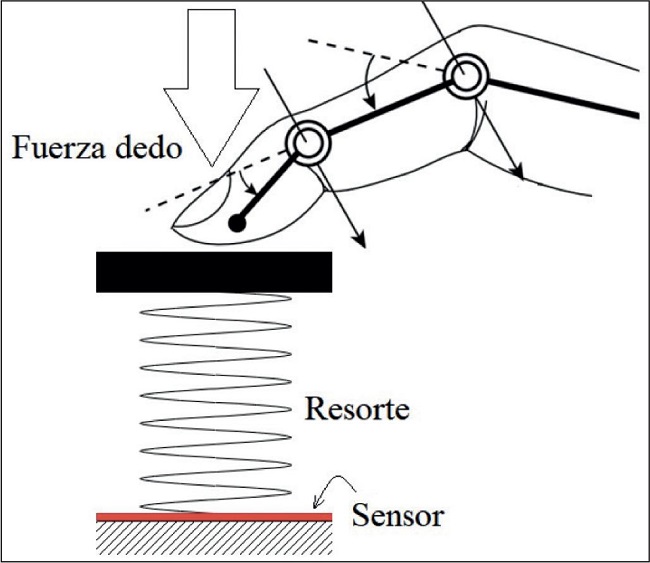
Para el diseño del mecanismo usamos un resorte que en uno de sus extremos está estático en contacto con el sensor y en el otro tiene la capacidad de contraerse y se encuentra al lado del dedo a medir (Fig. 3).
Teniendo como base un estudio mostrado en la Tabla I en el que se aproximan los tamaños de cada dedo de la mano, ajustamos el tamaño del dispositivo.
Tabla I. Medida de falanges de cada dedo
| Dedo | Falange Distal [mm] | Falange Media [mm] | Falange proximal [mm] | Metacarpiano [mm] |
|---|---|---|---|---|
| Pulgar | 21.67 ± 1.60 | 0 | 31.57 ±3.13 | 46.22 ± 3.94 |
| índice | 15.82 ± 2.26 | 22.38 ± 2.52 | 39.78 ± 4.94 | 68.12 ± 6.27 |
| Medio | 17.40 ± 1.85 | 26.33 ± 3.00 | 44.63 ± 3.81 | 64.60 ± 5.38 |
| Anular | 17.30 ± 2.22 | 25.65 ± 2.29 | 41.37 ± 3.87 | 58.00 ± 5.06 |
| Meñique | 15.96 ± 2.45 | 18.11 ± 2.54 | 32.74 ± 2.77 | 53.69 ± 4.36 |
Prototipo final
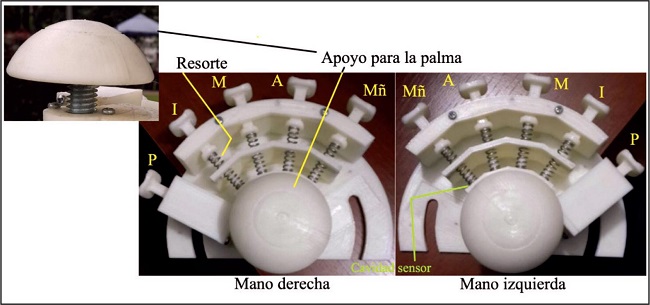
Realizamos la construcción final mediante impresión 3D debido a la complejidad del diseño, que impedía ser mecanizado con facilidad. La Fig. 4 muestra el resultado final después del montaje y su ubicación para la mano izquierda y derecha, donde además se ve el sistema de adaptación para descansar la mano sobre el dispositivo.
Interfaz gráfica
Construimos la interfaz gráfica en el software Matlab® (MathWorks, EE.UU.) y realizamos la comunicación con los sensores a través de un sistema embebido tipo Arduino. En el diseño de la interfaz tuvimos en cuenta la necesidad de visualizar el valor de fuerza en cada dedo, la conexión establecida con la tarjeta Arduino y el almacenamiento de datos. En la Fig. 5A presentamos un ejemplo de uso del sistema y en la Fig. 5B la interfaz de usuario, donde se observa el valor de la fuerza para cada uno de los dedos durante una toma de datos.

Medimos la fuerza de cada digito en 20 pacientes sanos (200 mediciones) y en 3 oportunidades diferentes mediante el dispositivo mencionado anteriormente, que realiza una adecuada discriminación de la fuerza de cada dedo en posición neutra de la mano para disminuir la alteración de la medición evidenciada en otros dispositivos ya presentes en el uso clínico. La distribución fue homogénea entre hombres y mujeres, sin antecedente de patologías de mano (Tabla II).
Tabla II. Características de los sujetos de prueba
| Paciente | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Género | F | M | F | F | M | F | M | F | M | M | F | M | M | M | F | M | F | F | M | F |
| Edad | 20 | 22 | 22 | 24 | 25 | 26 | 29 | 29 | 30 | 30 | 31 | 33 | 34 | 34 | 36 | 37 | 38 | 38 | 40 | 40 |
| LM | 17 | 19 | 18 | 15 | 17 | 17 | 19 | 18 | 19 | 18 | 17 | 18 | 19 | 18 | 17 | 20 | 17.5 | 16 | 19 | 19 |
| LP | 9 | 10 | 10 | 8 | 9 | 10 | 10 | 9 | 10 | 9 | 9 | 9 | 10 | 10 | 8.5 | 11 | 10 | 9 | 10 | 9.5 |
| AP | 8.5 | 9 | 8.5 | 7 | 8 | 8 | 9.5 | 8 | 9 | 9 | 8 | 9 | 10 | 9 | 8 | 10 | 8 | 7.5 | 9 | 9 |
| CM | 14 | 17 | 15 | 13 | 14 | 14 | 18 | 14 | 18 | 17 | 13 | 18 | 18.5 | 17 | 14 | 19 | 14.5 | 13 | 18 | 17 |
(LM) Longitud de la mano en centímetros, (LP) Longitud de la palma en centímetros, (AP) Anchura de la palma en centímetros, (CM) Circunferencia de la muñeca en centímetros
Resultados
La edad media de los sujetos de prueba fue de 20.7 + 10 años (20-40 años); la longitud media de la mano entre los hombres fue de 18.6 cm (17-20 cm) y entre las mujeres de 17.1 cm (15-19 cm); la longitud media de la palma entre los hombres fue de 9.8 cm (9-11 cm) y entre las mujeres de 9.2 cm (8.5-10 cm); la media de la circunferencia para los hombres fue de 17.2 cm (14-19 cm) y para las mujeres de 14.15 cm (13-17 cm).
En la Tabla III presentamos a modo de ejemplo los valores obtenidos en los 20 pacientes, los cuales están cercanos a la desviación estándar del trabajo de Domenico,(12) lo que nos hace pensar que el dispositivo entrega lecturas confiables y que los resultados son reproducibles en la población en general. Así mismo evidenciamos las diferencias en generación de fuerza según el género y la antropometría de la mano de los sujetos del grupo de estudio.
Tabla III. Datos recolectados. Fuerza medida en Newton
| Paciente | Mano | Pulgar | Índice | Medio | Anular | Meñique |
|---|---|---|---|---|---|---|
| 1 | Izquierda | 30.90 | 27.42 | 32.06 | 26.40 | 22.30 |
| Derecha | 31.50 | 28.31 | 34.10 | 27.46 | 24.20 | |
| 2 | Izquierda | 38.50 | 33.20 | 34.90 | 31.50 | 28.90 |
| Derecha | 36.40 | 30.20 | 30.98 | 29.10 | 25.70 | |
| 3 | Izquierda | 31.10 | 26.70 | 25.35 | 25.40 | 22.10 |
| Derecha | 31.30 | 27.30 | 28.15 | 26.10 | 23.40 | |
| 4 | Izquierda | 29.36 | 26.98 | 28.36 | 27.71 | 24.45 |
| Derecha | 35.84 | 33.89 | 34.10 | 33.39 | 27.21 | |
| 5 | Izquierda | 30.90 | 28.98 | 28.35 | 29.72 | 23.21 |
| Derecha | 32.50 | 32.31 | 34.10 | 31.46 | 24.20 | |
| 6 | Izquierda | 39.50 | 33.20 | 30.90 | 31.50 | 28.90 |
| Derecha | 35.40 | 30.07 | 28.94 | 29.41 | 26.84 | |
| 7 | Izquierda | 31.90 | 29.98 | 30.35 | 29.72 | 28.21 |
| Derecha | 36.40 | 32.12 | 33.24 | 32.30 | 29.56 | |
| 8 | Izquierda | 32.36 | 30.98 | 28.36 | 28.73 | 23.45 |
| Derecha | 35.84 | 33.89 | 32.10 | 34.39 | 28.20 | |
| 9 | Izquierda | 34.90 | 32.98 | 33.35 | 32.72 | 30.21 |
| Derecha | 37.50 | 35.31 | 34.10 | 33.46 | 31.20 | |
| 10 | Izquierda | 39.50 | 34.20 | 32.90 | 34.50 | 30.90 |
| Derecha | 36.40 | 32.07 | 30.94 | 32.41 | 29.84 | |
| 11 | Izquierda | 30.60 | 25.50 | 26.35 | 25.20 | 23.20 |
| Derecha | 31.40 | 27.20 | 28.30 | 26.35 | 23.30 | |
| 12 | Izquierda | 34.90 | 33.50 | 33.35 | 32.72 | 29.21 |
| Derecha | 37.50 | 35.40 | 35.10 | 33.46 | 30.20 | |
| 13 | Izquierda | 30.90 | 25.98 | 25.35 | 25.72 | 23.21 |
| Derecha | 31.35 | 27.12 | 28.24 | 26.30 | 23.56 | |
| 14 | Izquierda | 38.90 | 35.98 | 33.40 | 34.72 | 30.21 |
| Derecha | 35.50 | 34.20 | 33.24 | 33.80 | 29.56 | |
| 15 | Izquierda | 28.36 | 27.90 | 25.40 | 29.73 | 22.45 |
| Derecha | 34.80 | 32.89 | 30.10 | 34.10 | 28.10 | |
| 16 | Izquierda | 36.90 | 33.70 | 31.35 | 34.70 | 30.21 |
| Derecha | 33.50 | 32.20 | 30.30 | 32.40 | 29.20 | |
| 17 | Izquierda | 27.36 | 21.98 | 21.36 | 21.73 | 19.45 |
| Derecha | 35.84 | 33.89 | 34.10 | 36.39 | 29.21 | |
| 18 | Izquierda | 26.90 | 24.00 | 28.35 | 25.60 | 23.20 |
| Derecha | 30.35 | 27.29 | 28.80 | 26.32 | 23.18 | |
| 19 | Izquierda | 35.90 | 34.70 | 33.40 | 32.60 | 30.20 |
| Derecha | 39.90 | 36.90 | 31.35 | 34.50 | 31.30 | |
| 20 | Izquierda | 27.90 | 24.90 | 25.20 | 25.80 | 23.32 |
| Derecha | 29.35 | 27.12 | 28.20 | 26.10 | 23.68 |
Una vez tomadas las mediciones en los 20 pacientes de muestra, realizamos un promedio de la fuerza en cada uno de los dedos (Tabla IV).
Discusión
La mano, en coordinación con el sistema nervioso central, cumple funciones tales como tareas de exploración, aprehensión, precisión, percepción y manipulación, características que distinguen a los Homo sapiens sapiens de otras especies animales.(7) La medición de la fuerza de agarre de la mano y de cada dedo es una medida objetiva en la evaluación del paciente sano para la creación de un estándar que pueda ser comparable después al presentarse patologías que afectan a la función motora de la mano, ya sea a nivel de la unión neuromuscular, muscular, articular, tendinosa o del sistema de poleas.(2)
Respecto a esto, Canton(13) afirma que dentro de los factores que afectan a la fuerza de los dedos de manera individual cabe mencionar las variaciones en la longitud muscular, la distensibilidad músculo-tendón, las condiciones articulares, las afecciones neurológicas, el tipo y amplitud de pinzamiento, además de la posición corporal, la función del hombro, el codo, el antebrazo y las articulaciones radio-carpianas, metacarpo-falángicas e interfalángicas.
A nivel del primer dedo, la oposición funcional en la que se genera la mayor fuerza requiere el reclutamiento de múltiples grupos musculares que trabajan simultáneamente en la articulación trapecio-metacarpiana y la articulación metacarpo-falangica. La principal fuerza de oposición proviene del músculo abductor pollicis brevis, con los opponens pollicis y flexor pollicis brevis, proporcionando motores secundarios para maniobrar la oposición.
El tercer dedo proporciona la fuerza de flexión más individual y por su posición central participa tanto en el agarre de potencia como en los movimientos de precisión.
El cuarto dedo tiene menor fuerza y se usa con poca frecuencia para maniobras de agarre de precisión o pinza, por lo que su ausencia genera un menor impacto en la funcionalidad de la mano.(3)
El quinto dedo genera la menor fuerza en flexión; sin embargo, su ausencia puede resultar en una menor capacidad para el agarre, pues su articulación carpo-metacarpiana genera un rango de movimiento de 25 grados asociado a la estabilización por los músculos hipotenares.(3)
Para el rango de movimiento de los dedos, el 15% de la flexión digital intrínseca se produce en la articulación interfalángica distal, pero esta solo contribuye con el 3% al arco de flexión general del dedo. La articulación interfalángica proximal contribuye con el 85% de la flexión digital intrínseca y agrega un 20% al arco total del movimiento del dedo que tiene influencia directa sobre la generación de la fuerza.(3) Las articulaciones metacarpofalángicas contribuyen con el 77% del arco total de flexión de los dedos y son de gran importancia para los movimientos de aprehensión, que requieren que los dígitos se puedan extender y abducir en estas. Para movimientos de precisión, la mano debe tener rotación funcional y desviación cubital en dicha articulación.(3)
También debemos tener en cuenta que en los movimientos y en la generación de fuerza de los dedos, los músculos intrínsecos de la mano como los lumbricales e interóseos juegan un papel notable por su contribución a la movilización de la articulación metacarpo-falángica. Múltiples estudios han demostrado que la fuerza de los dedos es diferente entre sí y entre hombres y mujeres.
La fuerza del segundo dedo en mujeres corresponde al 54.1% en comparación a la fuerza de este digito en hombres; así mismo, el tercer dedo corresponde al 57.5% y el cuarto al 51.2% respecto al sexo opuesto. Estas mediciones están estandarizadas respecto a la posición durante el examen del hombro, de codo y de la muñeca (Massy-Westropp, 2004), debido a que la órtesis de la muñeca reduce significativamente la fuerza de agarre, siendo esta máxima a los 15º-30º de la mano dominante a los 15º, y a los 30º y 45º de la mano no dominante según el estudio realizado por Lee y col.(1)
La fuerza pico de los dedos se produce a 20º de extensión de la muñeca con 5º de desviación ulnar.(13) La sumatoria de dichas fuerzas, que varían de manera no proporcional según se genere movimiento de la muñeca de la posición descrita, resultan en la fuerza de agarre total de la mano.
Es de importancia mencionar que los dedos no son completamente independientes el uno del otro, por lo que el movimiento en un dedo genera producción de fuerza involuntaria en los otros, predominantemente en el dedo adyacente, siendo el segundo dedo el más independiente y el cuarto dedo el más afectado por dicho fenómeno.(15)
Múltiples estudios han objetivado la mejoría de la fuerza tras la manipulación quirúrgica y la rehabilitación de múltiples patologías de mano, como los realizados por Hammed y col. en 45 pacientes con osteoartritis tras un programa de entrenamiento de fuerza durante 10 semanas,(7) resultados que contrastaron con los hallazgos de los estudios realizados por Lefler y Armstrong en 2013 y de Stukstette en 2004, probablemente debido a diferencias en la metodología del estudio y de las características de los sujetos incluidos. En cualquier caso, mediante distintos dispositivos tales como el dinamómetro, podemos objetivar dicha medición teniendo como base las mediciones en el paciente sano.
La tecnología existente, ya sea electrónica o mecánica, se ha enfocado en la medición de la fuerza de la mano como un conjunto; sin embargo, dada la diversidad de movimientos y la independencia relativa de los sistemas de cada dígito, se considera importante la medición individual en cada dedo para determinar la normalidad en la población y, así mismo, poder realizar la evaluación del compromiso funcional o la evolución postoperatoria en pacientes con patologías que comprometan un dedo de manera aislada.
Las tasas de medición de nuestro dispositivo son equiparables a las de otros sistemas, lo que confirma su validez y lo hace de gran importancia en la evaluación de los pacientes; su aplicabilidad en la práctica clínica es una guía en el entendimiento de la funcionalidad del paciente sano.
Los avances en la ingeniería mecatrónica, electrónica y de sistemas, que incluyen entre otros el desarrollo de software y hardware, y en la medicina actual, nos permiten la evaluación objetiva de la fuerza de los dedos mediante nuevos dispositivos como el presentado en el presente artículo, el cual ha demostrado ser una herramienta clave en el seguimiento de los pacientes posterior a procesos traumáticos o postquirúrgicos. Es así como cada día procuramos disminuir el error humano en la medición de ángulos de movilidad, fuerza de agarre y pinza, entre otros tantos estudios, con el fin de realizar una correcta evaluación de los pacientes y estandarizar dichas mediciones.
Conclusiones
La medición de fuerza de los dedos permite medir la capacidad de agarre de un objeto, lo cual es determinante en el momento de realizar tareas rudimentarias o tareas que requieran de las más finas destrezas, además de ser una medida objetiva que permite generar estándares de fuerza en la población, y siempre teniendo en cuenta que esta varía con la edad y el sexo de los pacientes.
El estudio de la biomecánica de la mano humana es importante para entender el mecanismo que permite el movimiento en solitario de cada dedo y la generación de fuerza por cada dedo de manera independiente, así como del conjunto de estructuras que la conforman, ya que gracias a esto podemos establecer parámetros de medida de fuerza durante la evaluación del paciente sano,
Viendo la existencia de múltiples elementos en el ámbito clínico para la medición de la fuerza de agarre, debemos resaltar que el diseño del dispositivo que presentamos se acopla a la diversidad en el tamaño de las manos adultas y su capacidad de flexión de los dedos, como elemento único e innovador en la actualidad por permitir la medición individual de cada digito, que en múltiples ocasiones sufren lesiones aisladas, a la vez que comprobamos su validez al realizar diferentes mediciones en una población de estudio en la que obtuvimos resultados equivalentes a los descritos en la literatura internacional.
La evaluación mediante este dispositivo disminuye el error humano en la medición de la fuerza de agarre y pinza de manera individual de los dedos de la mano, pues se realiza a través de un sistema computarizado (hardware, software) que determina estos valores de forma automática.

