
Cirugía robótica y tecnología láser: una oportunidad para descubrir
Robotic surgery and laser technology: an opportunity for discovery
Juan I. Martínez-Salamanca, Claudio Martínez Ballesteros, Ashutosh Tewari1 y Joaquin A. Carballido.
Hospital Universitario Puerta de Hierro-Majadahonda. Universidad Autónoma de Madrid. Madrid. España.
1Weill Medical College. New York Presbyterian Hospital. Cornell University. USA.
Dirección para correspondencia
]]>
RESUMEN
El uso de la tecnología láser en el campo de la cirugía urológica ha vivido grandes avances en los últimos 20 años. Desde los comienzos de este siglo la tecnología robótica ha desembarcado de una manera decidida en nuestra especialidad y día tras día van siendo más y más las indicaciones en las cuáles está teniendo una implantación definitiva. Las actuales combinaciones del láser quirúrgico y los dispositivos robóticos, se pueden centrar en dos áreas claramente diferenciadas, pero posiblemente complementarias; la utilización del láser para guiar el procedimiento quirúrgico, lo que podríamos llamar "reconocimiento de estructuras" o "posicionamiento" y el uso de láser por su capacidad ablativa minimizando la pérdida sanguínea y aumentando la precisión de la resección. En este trabajo se revisan los artículos y aportaciones más recientes en la combinación de estas dos tecnologías.
Palabras clave: Robot. Da Vinci®. Nuevas tecnologías. Láser.
SUMMARY
The use of laser technology in the field of urologic surgery has experienced great advances over the past 20 years. Since the beginning of this century robotic technology has landed in a determined manner in our specialty and every day will be more and more indications on what is going to have a final deployment. The current combination of laser and surgical robots, can be focused on two distinct areas, but possibly complementary, the use of lasers to guide the surgical procedure, what we might call "landmarks and structures recognition" or "positioning" and laser use because of its ablative ability minimizing blood loss and increasing the resection accuracy. This paper reviews most recent articles and contributions on the combination of these two technologies.
Keywords: Robot. Da Vinci®. New technologies. Laser.
]]> Introducción
El uso de la tecnología láser en el campo de la cirugía urológica ha vivido grandes avances en los últimos 20 años. Su uso se ha expandido hasta convertirse en el "patrón de referencia" en algunas técnicas y procedimientos. Asimismo desde los comienzos de este siglo la tecnología robótica ha desembarcado de una manera decidida en nuestra especialidad y día tras día van siendo más y más las indicaciones en las cuáles va teniendo una implantación definitiva.
La fusión de la plataforma robótica Da Vinci® con la tecnología láser en cualquiera de sus formas, es algo que está naciendo, pero que sin duda no morirá y me atrevo a decir que esto es "sólo el principio" de una gran historia.
Los láseres con más implantación actual son el Holmium: YAG, el Neodimio-YAG y el CO2. Recientemente varios grupos están comunicando experiencias interesantes con el láser de Tulio (1) y de Erbio: YAG (2).
Uno de los desarrollos técnicos que ha permitido extender su aplicación en la urología y más concretamente en la endourología (incluyendo técnicas laparoscópicas y robóticas) ha sido la posibilidad de conducir la energía láser a través de fibras flexibles que se pueden introducir por los canales de trabajo del instrumental endoscópico (Figuras 1 y 2).
]]>

Estas fibras fabricadas en sílice permiten transmitir la energía láser desde el generador al punto de aplicación. Son bio-compatibles y flexibles, relativamente económicas, razonablemente duraderas, si se utilizan a potencia moderada, y pueden ser reutilizadas.
El extremo distal de la fibra puede emitir la energía de manera directa (en paralelo a la fibra), de manera lateral (con cierto ángulo con respecto a la fibra) o "en dispersión" (con extremo multiperforado) (Figura 3).

Las ventajas que ofrece la cirugía robótica hoy en día, podemos concretarlas en:
• Mejor visualización de las estructuras anatómicas, debido a la magnificación y la visión tridimensional.
]]> • Mejor destreza quirúrgica para el cirujano, simplificando la técnica, filtrando el temblor y escalando sus movimientos naturales con mayores grados de libertad que en la cirugía laparoscópica convencional.
Estos dos pilares han llevado a disminuir la curva de aprendizaje para la realización de procedimientos urológicos de rutina, permitiendo estandarizar el procedimiento y hacerlo accesible a muchos más cirujanos (lo que implica muchos pacientes) de una manera más homogénea y más ética.
Aunque estas ventajas sin duda han supuesto un enorme avance, no podemos dejar de mencionar las potenciales ventajas del dispositivo electrónico que se contiene dentro de la consola quirúrgica.
El actual sistema Da Vinci® S HD, permite proyectar dentro del campo visual del cirujano imágenes, a tiempo real o diferido de cualquier tipo (angiografías, imágenes o reconstrucciones 3D de TC o RMN de alta resolución, ecocardiografía a tiempo real).
Esto va a permitir en muy poco tiempo, el desarrollo clínico de la cirugía guiada por la imagen, mediante técnicas de "realidad aumentada", "imagen-fusión", "realidad virtual" y "reconocimiento de tejidos a tiempo real".
Lo que ha sido un sueño desde hace décadas, puede convertirse en realidad y sin duda, el actual sistema Da Vinci® y otros que estén por llegar, suponen por el momento la plataforma ideal.
Las actuales combinaciones del láser quirúrgico y los dispositivos robóticos, se pueden centrar en dos áreas claramente diferenciadas, pero posiblemente complementarias:
]]>• La utilización del láser para guiar el procedimiento quirúrgico, lo que podríamos llamar "reconocimiento de estructuras" o "posicionamiento".
• El uso de láser por su capacidad ablativa minimizando la pérdida sanguínea y aumentando la precisión de la resección.
Láser como sistema de reconocimiento y posicionamiento durante cirugía robótica
Ha sido y sigue siendo el anhelo de cualquier cirujano, disponer de algún sistema que guíe sus ojos y sus manos, con una precisión milimétrica, al lugar de la lesión a extirpar, reconociendo y evitando dañar las estructuras anatómicas vecinas que se encontrará a su paso.
Revisando la literatura reciente en el campo de la Bioingeniería y de la imagen médica, hay varias referencias y grupos de investigación trabajando activamente en el tema.
Las estrategias que permitan realizar una cirugía guiada a tiempo real, pueden venir de la mano de dos planteamientos, que incluso se pueden complementar; una posible opción es utilizar los sistema radiológicos actuales (TC Alta resolución o RMN) (3) para, acoplados al sistema robótico, realizar cortes a tiempo real y así poder obtener imágenes que el cirujano vea dentro de la consola quirúrgica y le pueden guiar a la lesión. Hasta el momento, por su gran complejidad técnica, sólo se ha realizado en ambientes experimentales. Sería seguir el mismo ejemplo que actualmente utilizan los sistemas de radio cirugía craneal o corporal.
Otros planteamientos están relacionados con la introducción dentro de la cavidad abdominal o torácica de dispositivos que permitan identificar y reconstruir las estructuras anatómicas que están visualizando. En este sentido el grupo de la Universidad de Tokio (4) ha comunicado recientemente el uso de un sistema láser como "scanner de superficie" asociado a un endoscopio y un brazo robótico con control mediante voz tipo AESOP (5) (Laser-scan endoscope) (Figura 4).
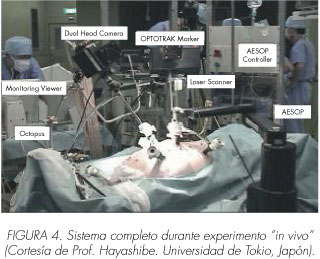
Se trata de un sistema complejo y "a priori", algo voluminoso que a través de varios dispositivos permite adquirir datos de imagen así como textura, tamaño, densidad, localización, etc., de las distintas estructuras intraabdominales, mediante el barrido de su superficie por una fibra láser (Figura 5).
]]>
La posibilidad de reconstruir geométricamente la forma de determinadas superficies, puede ser de utilidad para calcular tridimensionalmente las distancias y relaciones espaciales entre estructuras y, así evitar la colisión de instrumentos o lesiones inadvertidas de órganos vecinos o que se encuentren en la misma trayectoria. El sistema permite avisar al cirujano con antelación, antes de que produzca la colisión, para evitarla. De esta forma, se aumenta de una manera exponencial la seguridad del procedimiento (Figura 6 y 7).
]]> Además de estas virtudes, el sistema es capaz de generar una imagen tridimensional de los objetos captados en su superficie así como la textura de los mismos (Figura 5). Esta tecnología permite manejar el sistema vía satélite o simplemente vía Web para la realización de tele-cirugía o tele-diagnóstico. De la misma forma los patrones de textura asociados o no a la administración de luz ultravioleta pueden ser útiles desde el punto de vista diagnóstico.
Esto puede permitir, algo así, como que un sistema "integre o interiorice" la realidad de una imagen. Posteriormente permitiría correlacionar este patrón o modelo con una imagen previa (TC o RMN, etc.) y sobre-imponer ambas imágenes de manera que permitan guiar al cirujano (Tecnología "Imagen-Fusión").
Para recrear la realidad tridimensional utiliza el mismo principio que la cirugía robótica Da Vinci®, combina el uso de dos cámaras en paralelo que generan una imagen 3D. La fibra láser (100mW) se introduce en el abdomen acoplada a una cámara digital de alta velocidad. El láser y la cámara se coordinan mediante un sistema que se denomina OPTOTRAK (Northern Digital Inc.) (4) (Figura 7).
Una limitación clara de este sistema radica, en que hasta el momento, sólo es capaz de captar información de la superficie del órgano o tejido, pero no, de todo su volumen tridimensional.
Se han publicado en la literatura algunas aproximaciones de análisis de imagen laparoscópica para mejorar la segmentación, localización y rastreo de los instrumentos laparoscópicos (5, 6). El posicionamiento autónomo de los instrumentos laparoscópicos mediante el uso de un puntero láser y un endoscopio monocular fue descrito en 2003 por Krupa y cols. (7). Este sistema permite al cirujano manipular instrumentos que se encuentran fuera de su campo visual.
Los láseres también han sido aplicados para realizar triangulaciones de instrumentos sobre un objetivo fijo y predefinido (8).
Otra aplicación centrada en mejorar la capacidad de maniobrabilidad de los instrumentos laparoscópicos es el sistema "what-you-draw-is-what-you-cut ("lo que tú que dibujas, es lo que tú cortas") (9, 10). Este ingenio fue ideado para mejorar la precisión de la ablación mediante láser CO2 en lesiones de endometriosis en cirugía ginecológica.
Consiste en un tablero digital a modo de paleta gráfica en la cuál el cirujano dibuja o diseña el contorno, forma o trayectoria de la zona en la que el láser, en este caso tipo Sharplan® 1030 1.5W (láser CO2) va a realizar un acción, permitiendo realizar una aplicación del efecto láser de una manera mucho más precisa y exacta.
En otro campo completamente diferente como es la neurocirugía también ha sido de utilidad la aplicación del posicionamiento mediante láser (11). En cirugía de base de cráneo, la tecnología robótica permite una gran precisión en los movimientos quirúrgicos. El sistema conocido como ROBIN equipado con sensores láser toma medidas o referencias geométricas con respecto a puntos anatómicos fijos (habitualmente óseos) y los comparan con referencias previamente establecidas mediante simulación preoperatoria con TC (11). Los autores comunican que el sistema ofrece una precisión en medida de resolución espacial de 0.02 mm en cada dimensión. Por tanto, permite realizar una microcirugía robótica guiada mediante láser.
]]> Aplicación del láser como tecnología ablativa durante cirugía robótica
La mayor parte de las aplicaciones clásicas de los diferentes tipos de láser (Holmium-YAG, Nd-YAG, C02, KTP, etc.) en el campo de la cirugía urológica han sido por su capacidad ablativa, fragmentadora o exerética.
Los antecedentes más importantes de la aplicación del láser como elemento ablativo en procedimientos de cirugía robótica se produjeron a finales de la década de los noventa en el campo de la cirugía cardíaca mínimamente invasiva (12-14).
Hughes y cols., demostraron primero en un modelo animal (12) y posteriormente en humanos (13) la viabilidad y eficacia de la revascularización miocárdica mediante la realización de múltiples (hasta 25) canales transmurales con fibra láser Holmium-Yag en el espesor miocárdico del ventrículo izquierdo (Figura 8). Es un procedimiento indicado en enfermos con muy mala situación basal no subsidiarios de otros tratamientos endovasculares. A través de un abordaje toracoscópico y del uso de sistema Da Vinci® se introduce la fibra láser y, sin necesidad de bypass ni cardioplejia es posible realizar dichos túneles para mejorar la vascularización miocárdica (14, 15).

Hace escasos meses ha sido descrito una nuevo dispositivo del sistema Da Vinci® con aprobación FDA (Food and Drug Administration) conocido como "Endowrist® Introducer 5Fr (16). Consiste en una cánula que permite el paso a través de su luz de una fibra láser. Inicialmente esta aprobada para Lasercope Aura XP® (17) y Lisa Laser Revolix® (18). En el primer caso se trata de un láser KTP y en segundo de ellos, un láser de Tulio.
El elemento de trabajo permite realizar movimientos con los mismos grados de libertad que el sistema Endo-wrist® pero el elemento efector del mismo no es una pinza o una tijera sino la fibra láser y su emisión.
De esta manera se suman las ventajas de la precisión y maniobrabilidad clásica de los instrumentos robóticos acompañado del poder ablativo de los diferentes tipos de energía láser.
]]> Recientemente el grupo de Mayo Clinic (1) ha presentado una experiencia pionera en un modelo animal (porcino), realizando nefrectomías parciales sin clamplaje vascular con una fibra de láser de Tulio acoplada a un sistema Laser fiber Introducer® (16). Los autores comunican unos resultados excelentes en cuanto a minimización de las pérdidas sanguíneas, seguridad y precisión en la línea de corte (1).La fibra láser de Tulio tiene unas particularidades específicas. No sólo permite transmitir la energía que se produce en el generador (como las fibras de sílice convencionales) sino que además la fibra, por sí sola, es capaz de producir energía láser. Tiene la particularidad de poder modular la longitud de onda desde 1,800 a 2,100 nm. Por tanto puede ser utilizado para las mismas aplicaciones que el láser Holmium: YAG (litotricia, incisión de estenosis, enucleación y vaporización prostática, etc.). El generador es más pequeño y manejable que otros tipos de láser, ya que no precisa sistema de enfriamiento mediante agua (2).
Habrá que esperar a la experiencia clínica pero, probablemente sea un nuevo camino a explorar, ya que los resultados parecen muy prometedores.
Desde su comienzos la vocación del robot da Vinci era la cirugía endocavitaria, es decir, aquella que se realiza bajo neumoperitoneo y mediante técnicas laparoscópicas. Sin embargo, en determinadas especialidades, como la cirugía de cabeza y cuello se exploró otra posible aplicación. El concepto se basa en utilizar el sistema Da Vinci® como herramienta de trabajo quirúrgico que aporta precisión, visión magnificada y estable y filtración del temblor del cirujano. Por tanto, sería algo así como un apoyo técnico a la microcirugía clásica.
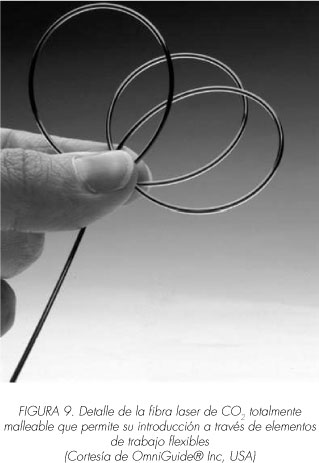
En este sentido, se empezaron a expandir sus usos en intervenciones de cirugía laríngea (19-21), oral y máxilofacial (22). El grupo de Cleveland Clinic (23) publicó el pasado año, su experiencia en la realización de laringectomías supraglóticas asistidas mediante robot y utilizando el láser de CO2. La fibra flexible (OmniGuide, Boston MA) permite su introducción y fácil manejo mediante los instrumentos robóticos convencionales (Figura 9).
Asimismo el grupo de la Universidad de Pennsylvania, pionero mundial en esta técnica, ha descrito su utilización en la extirpación de neoplasia de base de lengua mediante la fusión de estas tecnologías (22).
]]> Conclusión
Tras lo expuesto anteriormente, podemos afirmar que estamos asistiendo a una fusión de tecnologías con claro efecto potenciador.
Las ventajas de la tecnología láser que pueden aportar soluciones a determinadas limitaciones técnicas se acompañar de los beneficios técnicos de la actual plataforma Da Vinci®.
Estamos seguros que en los próximos año viviremos de una manera trepidante la aparición de nuevas combinaciones de estos dispositivos que seguro, nos harán mejorar nuestros resultados y por tanto la calidad de la atención a nuestros pacientes.
Bibliografía y lecturas recomendadas (*lectura de interés y **lectura fundamental)
**1. TOLLEFSON, M.; GETTMAN, M.; FRANK, I.: "Hemostatic robotic assisted laparoscopic partial nephrectomy in a porcine model using a Thulium Laser". J. Urol., 179: 365, 2008. [ Links ]
*2. PIERRE, S.A.; ALBALA, D.M.: "The future of lasers in urology". World J. Urol., 25: 275, 2007. [ Links ]
**3. HAYASHIBE, M.; SUZUKI, N.; HATTORI, A. y cols.: "Surgical navigation display system using volume rendering of intraoperatively scanned CT images". Comput Aided Surg., 11: 240, 2006. [ Links ]
**4. HAYASHIBE, M.; SUZUKI, N.; NAKAMURA, Y.: "Laser-scan endoscope system for intraoperative geometry acquisition and surgical robot safety management". Med. Image Anal, 10: 509, 2006. [ Links ]
5. WANG, Y.F.; UECKER, D.R.; WANG, Y.: "A new framework for vision-enabled and robotically assisted minimally invasive surgery". Comput. Med. Imaging Graph., 22: 429, 1998. [ Links ]
6. WEI, G.Q.; ARBTER, K.; HIRZINGER, G.: "Realtime visual servoing for laparoscopic surgery. Controlling robot motion with color image segmentation". IEEE Eng. Med. Biol. Mag., 16: 40, 1997. [ Links ]
*7. KRUPA, A.; GANGLOFF, J.; DOIGNON, C. y cols.: "Autonomous 3-D positioning of surgical instruments in robotized laparoscopic surgery using visual servoing". IEEE Transactions on Robotics and Automation, 19: 842, 2003. [ Links ]
8. HANEISHI, H.; YAGIHASHI, Y.; MIYAKE, Y.: "A new method for distortion correction of electronic endoscope images". IEEE Trans. Med. Imaging, 14: 548, 1995. [ Links ]
*9. TANG, H.W.; VAN BRUSSEL, H.; SLOTEN, J.V. y cols.: "Implementation of an intuitive writing interface and a laparoscopic robot for gynaecological laser assisted surgery". Proc. Inst. Mech. Eng., 219: 293, 2005. [ Links ]
*10. TANG, H.W.; VAN BRUSSEL, H.; VANDER SLOTEN, J. y cols.: "Evaluation of an intuitive writing interface in robot-aided laser laparoscopic surgery. Comput". Aided. Surg., 11: 21, 2006. [ Links ]
11. MAASSEN, M.M.; MALTHAN, D.; STALLKAMP, J. y cols.: "Laser-based quality assurance for robot-assisted milling at the base of the skull". Hno., 54: 105, 2006. [ Links ]
12. HUGHES, G.C.; ABDEL-ALEEM, S.; BISWAS, S.S. y cols.: "Transmyocardial laser revascularization: Experimental and clinical results". Can. J. Cardiol., 15: 797, 1999. [ Links ]
13. HUGHES, G.C.; BISWAS, S.S.; YIN, B. y cols.: "A comparison of mechanical and laser transmyocardial revascularization for induction of angiogenesis and arteriogenesis in chronically ischemic myocardium". J. Am. Coll. Cardiol., 39: 1220, 2002. [ Links ]
**14. BRUNSTING, L.A. 3rd.; BINFORD, R.S.; BRALY, K.C. y cols.: "Totally endoscopic robot-assisted transm-yocardial laser revascularization". Ann. Thorac. Surg., 82: 744, 2006. [ Links ]
*15. YUH, D.D.; SIMON, B.A.; FERNANDEZ-BUSTAMANTE, A. y cols.: "Totally endoscopic robot-assisted transmyocardial revascularization". J. Thorac. Cardiovasc. Surg., 130: 120, 2005. [ Links ]
**16. www.fda.gov/cdrh/pdf7/K072627.pdf: [ Links ]
17. http://www.laserscope.com/products/aura.html: [ Links ]
18. http://www.lisalaser.de/: [ Links ]
19. HOCKSTEIN, N.G.; NOLAN, J.P.; O'MALLEY B,W. Jr. y cols.: "Robotic microlaryngeal surgery: A technical feasibility study using the daVinci surgical robot and an airway mannequin". Laryngoscope, 115: 780, 2005. [ Links ]
*20. HOCKSTEIN, N.G.; NOLAN, J.P; O'MALLEY, B.W. Jr. y cols.: "Robot-assisted pharyngeal and laryngeal microsurgery: results of robotic cadaver dissections". Laryngoscope, 115: 1003, 2005. [ Links ]
21. O'MALLEY, B.W. Jr.; WEINSTEIN, G.S.; HOCKSTEIN, N.G.: "Transoral robotic surgery (TORS): Glottic microsurgery in a canine model". J. Voice., 20: 263, 2006. [ Links ]
22. O'MALLEY, B.W. Jr.; WEINSTEIN, G.S.; SNYDER, W. y cols.: "Transoral robotic surgery (TORS) for base of tongue neoplasms". Laryngoscope, 116: 1465, 2006. [ Links ]
*23. SOLARES, C.A.; STROME, M.: "Transoral robot-assisted CO2 laser supraglottic laryngectomy: Experimental and clinical data". Laryngoscope, 117: 817, 2007. [ Links ]
]]>
 Dirección para correspondencia:
Dirección para correspondencia:
Juan I. Martínez-Salamanca
Hospital Universitário
Puerta de Hierro-Majadahonda
Universidad Autónoma de Madrid
Manuel de Falla, 1
28222 Majadahonda Madrid. (España)
msalamanca99@hotmail.com